Структурные схемы в САУ
Обычно структурная схема САР состоит из отдельных элементов, соединенных последовательно, параллельно или с помощью обратных связей. Каждый элемент имеет один вход, один выход и заданную передаточную функцию. Структурная схема САУ в простейшем случае строится из элементарных динамических звеньев. Но несколько элементарных звеньев могут быть заменены одним звеном со сложной передаточной функцией. Для этого существуют правила эквивалентного преобразования структурных схем.
Рассмотрим возможные способы преобразований.
1. Последовательное соединение - выходная величина предшествующего звена подается на вход последующего (рис. 3.13). При этом можно записать:
y1 = W1 yo,
yo,
 = W2y1,
= W2y1,
... ;
yn = Wny1-n 
yn = W1W2.....Wn,
yo = Wэквyo,;
 ,
,
где n – число элементарных звеньев.

Рисунок 3.13 – Последовательное соединение звеньев САУ.
То есть цепочка последовательно соединенных звеньев преобразуется в эквивалентное звено с передаточной функцией, равной произведению передаточных функций отдельных звеньев.
2. Параллельно - согласное соединение (рис.3.14.) - на вход каждого звена подается один и тот же сигнал, а выходные сигналы – складываются. Тогда:
y = y1 + y2 + ... + yn = (W1 + W2 + ... + W3)yo = Wэквyo,
где  .
.
То есть цепочка звеньев, соединенных параллельно - согласно, преобразуется в звено с передаточной функцией, равной сумме передаточных функций отдельных звеньев.

Рисунок 3.14 – Параллельно-согласное соединение звеньев САУ.
3. Параллельно - встречное соединение (рис. 3.15а) - звено охвачено положительной или отрицательной обратной связью. Участок цепи, по которому сигнал идет в противоположном направлении по отношению к системе в целом (то есть с выхода на вход), называется цепью обратной связи с передаточной функцией Wос. При этом для отрицательной ОС:
y = Wпu;
y1 = Wосy;
u = yo - y1,
следовательно,
y = Wпyo - Wпy1 = Wпyo - WпWocy
y(1 + WпWoc) = Wпyo y = Wэквyo,
 где
где 
|
Рисунок 3.15 – Параллельно- встречное соединение звеньев.
Аналогично для положительной ОС:
Если Woc = 1, то обратная связь называется единичной (рис.3.15б), тогда Wэкв = Wn /(1 ± Wn).
Замкнутую систему называют одноконтурной, если при ее размыкании в какой либо точке получают цепочку из последовательно соединенных элементов (рис.3.16а). Участок цепи, состоящий из последовательно соединенных звеньев, соединяющий точку приложения входного сигнала с точкой съема выходного сигнала, называется прямой цепью (рис.3.16б). Передаточная функция прямой цепи – Wп = WoW1W2.
Цепь из последовательно соединенных звеньев, входящих в замкнутый контур, называют разомкнутой цепью (рис.3.16в), передаточная функция которой Wp = W1 W2 W3W4.
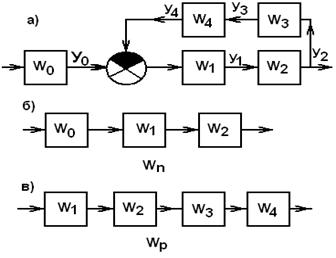
Рисунок 3.16 – Замкнутая одноконтурная система.
Исходя из приведенных выше способов эквивалентного преобразования структурных схем, одноконтурная система может быть представлена одним звеном с передаточной функцией:
Wэкв = Wп/(1 ± Wp)
– передаточная функция одноконтурной замкнутой системы с отрицательной ОС равна передаточной функции прямой цепи, поделенной на единицу плюс передаточная функция разомкнутой цепи.
Для положительной ОС в знаменателе – знак минус. Если сменить точку снятия выходного сигнала, то меняется вид прямой цепи. Так, если считать выходным сигнал y1 на выходе звена W1, то
Wp = WoW1.
Выражение для передаточной функции разомкнутой цепи не зависит от точки снятия выходного сигнала.
Замкнутые системы бывают одноконтурными и многоконтурными (рис.3.17). Чтобы найти эквивалентную передаточную функцию для данной схемы, нужно сначала осуществить преобразование отдельных участков.

Рисунок 3.17 – Многоконтурные замкнутые системы.
Если многоконтурная система имеет перекрещивающиеся связи, то для вычисления эквивалентной передаточной функции нужны дополнительные правила. Эти правила сведены в таблицу 3.1.
Найденные с помощью правил структурных преобразований передаточные функции позволяют достаточно просто определить временные и частотные характеристики и получить качественные и количественные оценки динамики и статики САР.
Таблица 3.1 – Правила структурных преобразований
| Преобразование | Структурная схема | |||||
| Исходная | Эквивалентная | |||||
    Перенос точки разветвления через элемент Перенос точки разветвления через элемент
| ||||||
   Перенос сумматора через элемент Перенос сумматора через элемент
|
|

| ||||
    Вынос точки разветвления из параллельного соединения Вынос точки разветвления из параллельного соединения
| ||||||
    Вынос точки разветвления из контура обратной связи Вынос точки разветвления из контура обратной связи
|
|
Контрольные вопросы к главе 3.
1. Что называется статическим режимом САУ?
2. Что называется статическими характеристиками САУ?
3. В каком случае статическая характеристика задается семейством кривых?
4. Что называется уравнением статики САУ?
5. Что называется коэффициентом передачи, в чем его отличие от
коэффициента усиления?
6. В чем отличие нелинейных звеньев от линейных?
7. Как построить статическую характеристику нескольких звеньев?
8. В чем отличие астатических звеньев от статических?
9. В чем отличие астатического регулирования от статического?
10. Как сделать статическую САР астатической?
11. Что называется статической ошибкой регулятора, как ее уменьшить?
12. Что называется статизмом САР?
13. Назовите достоинства и недостатки статического и астатического
регулирования?
14. Какой режим САУ называется динамическим?
15. Что называется регулированием?
16. Назовите возможные виды переходных процессов в САУ.
17. Что называется уравнением динамики?
18. Как провести теоретическое исследование динамики САУ?
19. Почему уравнение динамики САУ называется уравнением в отклонениях?
20. Справедлив ли для уравнения динамики САУ принцип суперпозиции?
21. Представьте звено с двумя и более входами схемой, состоящей из звеньев с одним входом?
22. Запишите линеаризованное уравнение динамики в обычной форме.
23. Какими свойствами обладает дифференциальный оператор p?
24. Что называется передаточной функцией звена?
25. Запишите линеаризованное уравнение динамики с использованием передаточной функции.
27. Что называется динамическим коэффициентом усиления звена?
28. Что называется характеристическим полиномом звена?
29. Что называется нулями и полюсами передаточной функции?
30. Что называется динамическим звеном?
31. Что называется структурной схемой САУ?
32. Что называется элементарными и типовыми динамическими звеньями?
33. Как сложную передаточную функцию разложить на передаточные функции типовых звеньев?
34. Запишите линеаризованное уравнение динамики в операторной форме.
35. Перечислите типичные схемы соединения звеньев САУ?
36. Как преобразовать цепь последовательно соединенных звеньев к одному звену?
37. Как преобразовать цепь параллельно соединенных звеньев к одному звену? Как преобразовать обратную связь к одному звену?
38. Что называется прямой цепью САУ?
39. Что называется разомкнутой цепью САУ?
40. Как перенести сумматор через звено по ходу и против движения сигнала?
41. Как перенести узел через звено по ходу и против движения сигнала?
42. Как перенести узел по ходу и против движения сигнала?
43. Как перенести сумматор через сумматор по ходу и против движения сигнала?
44. Как перенести узел через сумматор и сумматор через узел по ходу и против движения сигнала?
45. Что называется неэквивалентными участками линий связи в структурных схемах?
46. Как преобразовать обратную связь к одному звену?