Назначение и функциональные части привода
Привод контактной системы предназначен для замыкания и размыкания коммутирующих контактов путем перемещения подвижного контактного узла. В аппаратах применяют механические, электромагнитные, магнитоэлектрические и иные типы приводов.
Механический привод устанавливают в аппаратах ручного управления, путевых и конечных выключателях. Он преобразует механическое воздействие в перемещение (поступательное ρ или поворотное θ ) подвижного контактного узла ПКУ (см. п. 2.3). Входное управляющее воздействие на привод может рассматриваться как силовое воздействие (см. п. 1.3) в виде функциональной зависимости силы F или момента силы М от времени t . В качестве воздействия может рассматриваться также движение органа управления, характеризуемое перемещением z или скоростью ż=dz/dt в функции времени. Такое воздействие, например, на механический привод путевого выключателя, может создаваться движущимся с определенной скоростью объектом.
В электротехнике выделяют идеализированные источник напряжения и источник тока бесконечной мощности. И в механике могут быть выделены идеальные источник силы и источник скорости также бесконечной мощности. Поэтому удобно полагать, что механический привод получает управляющее воздействие либо от источника силы, либо от источника скорости. В этих случаях привод не оказывает влияния на работу соответствующего источника. Конструируют привод с учетом того, от какого источника управляющего воздействия он получает входной сигнал.
Электромагнитный, магнитоэлектрический и иной электромеханический привод аппарата получает входное воздействие, как считается по умолчанию, либо от источника напряжения, например, электромагнитный привод контактора, либо от источника тока, например, магнитоэлектрический привод реле тока. Аппараты с такими приводами называют аппаратами дистанционного действия, поскольку электрический сигнал управления может передаваться аппарату по проводам на большие расстояния.
Выделим в приводе аппарата две функциональные части: преобразовательное устройство (преобразователь) УП и передаточное устройство ПУ (рис. 3.1).
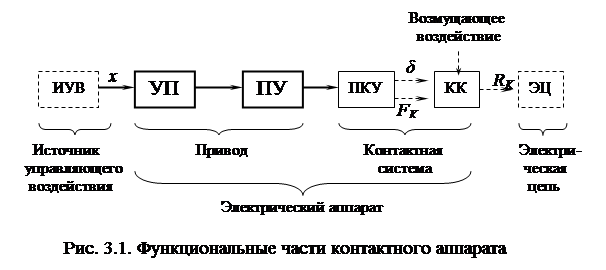
Преобразователь УП преобразует внешнее управляющее воздействие (x) в механическую форму энергии. Она передается передаточным устройством ПУ подвижному контактному узлу ПКУ, чтобы произвести замыкание или размыкание коммутирующего контакта КК и удерживать его в замкнутом или разомкнутом состоянии. В большинстве электрических аппаратов предусматривают несколько коммутирующих контактов в контактной системе и один привод для контактной системы.
Передаточное устройство ПУ привода и отдельный подвижный контактный узел ПКУ образуют в совокупности механическую передачу (МП), которая передает механическую энергию определенному коммутирующему контакту КК от преобразователя УП. В электроаппарате может быть предусмотрено несколько преобразовательных устройств, способных воздействовать на ПУ. Например, в автоматическом воздушном выключателе обычно предусматривают несколько расцепителей, каждый из которых является по существу преобразовательным устройством.