В каких тормозных режимах может работать асинхронный двигатель? Как эти режимы могут быть получены. Механические характеристики.
Торможение АД можно осуществить при питании его от сети переменного тока путем подключения цепи статора к источнику постоянного тока (динамическое торможение), а также при его самовозбуждении.
Торможение противовключениемосуществляется двумя путями. Один из них связан с изменением чередования на статоре двух фаз питающего АД напряжения. Допустим, например, что АД работает по механической характеристике 1 в точке а (рис. 5.36, а) при чередовании на статоре фаз напряжения сети ABC. Тогда при переключении двух фаз (например, В и С) АД переходит на работу по характеристике 3 в точке d, участок db которой соответствует торможению противовключением. Отметим, что при реализации торможения для ограничения тока и момента АД производится включение добавочных резисторов в цепь ротора или статора.
Другой путь перевода АД в режим торможения противовключением может быть использован при активном характере момента нагрузки Мк. Допустим, что требуется осуществить спуск груза, обеспечивая его торможение с помощью АД (так называемый тормозной спуск груза). Для этого АД включается на подъем с большим добавочным сопротивлением R2Д в цепи ротора (кривая 2). Вследствие превышения моментом нагрузки МС пускового момента двигателя МП и его активного характера груз начнет опускаться с установившейся скоростью. АД при этом будет работать в режиме торможения противовключением.

Рекуперативное торможение осуществляется в том случае, когда скорость АД превышает синхронную ωо и он работает в генераторном режиме параллельно с сетью. Такой режим возникает, например, при переходе двухскоростного АД с высокий скорости на низкую, как это показано на рис. 5.36, б. Предположим, что в исходном положении АД работал по характеристике 1 в точке а, вращаясь со скоростью ωУСТ1.При увеличении числа пар полюсов АД переходит на работу по характеристике 2 в точке b, участок bc которой соответствует торможению с рекуперацией (отдачей) энергии в сеть.
Этот же вид торможения может быть реализован в системе «преобразователь частоты - двигатель» при останове АД или его переходе с характеристики на характеристику. Для этого осуществляется уменьшение частоты выходного напряжения ПЧ, а значит, и синхронной скорости. В силу механической инерции текущая скорость АД со будет изменяться медленнее, чем скорость вращения магнитного поля, т. е. будет постоянно ее превышать. За счет этого и возникает режим торможения с отдачей энергии в сеть. Отметим, что ПЧ должен быть способен при этом передать энергию от двигателя в сеть.
Рекуперативное торможение также может быть реализовано в ЭП грузоподъемных механизмов при спуске грузов. Для этого АД включается в направлении спуска груза (характеристика 3 на рис. 5.36, а). После окончания разбега он будет работать в точке с со скоростью -ωуст2. При этом осуществляется процесс спуска груза с отдачей энергии в сеть.
Рекуперативное торможение является наиболее экономичным видом торможения АД.
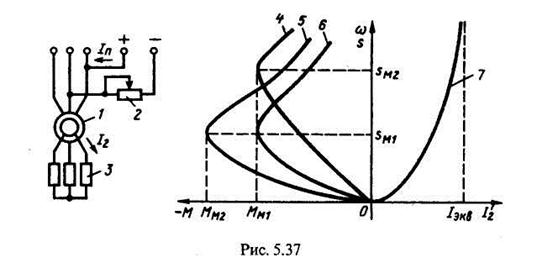
Для динамического торможения обмотку статора АД отключают от сети переменного тока и подключают к источнику постоянного тока, как это показано на рис. 5.37. Обмотка ротора АД 1 при этом может быть закорочена или в ее цепь включаются добавочные резисторы 3 с сопротивлением R2Д.
Постоянный ток /п, значение которого может регулироваться резистором 2, протекает по обмоткам статора и создает неподвижное в пространстве магнитное поле (возбуждает АД). При вращении ротора в нем наводится ЭДС, под действием которой в обмотке протекает ток, создающий магнитный поток, также неподвижный в пространстве. Взаимодействие тока ротора с результирующим магнитным полем АД создает тормозной момент, за счет которого достигается эффект торможения. Двигатель в этом случае работает в режиме генератора независимо от сети переменного тока, преобразовывая кинетическую энергию движущихся частей ЭП и рабочей машины в электрическую, которая рассеивается в виде тепла в цепи ротора.
Электромеханическую I2'(s) (кривая 7) и механические M(s) кривые 4... 6 характеристики АД.
Характеристика I'R(s) расположена на рисунке в первом квадранте, где s = ω/ω0 - скольжение АД в режиме динамического торможения. Механические характеристики АД расположены во втором квадранте.
Различные искусственные механические характеристики АД в режиме динамического торможения можно получить, изменяя сопротивление R2Д добавочных резисторов 3 в цепи ротора или постоянный ток /п, подаваемый в обмотки статора. На рисунке показаны механические характеристики АД для различных сочетаний /п и R2д. Характеристика 6 соответствует току /п1 и сопротивлению резистора R2Д1 максимальный момент на ней равен Мм1, а скольжение, ему соответствующее, - sМ1. Увеличение сопротивления резисторов 3 R2Д2 > R2Д1 при /п = const не приводит к изменению максимального момента, в то время как максимальное скольжение sm при этом пропорционально возрастает, что видно из характеристики 4.
Торможение при самовозбуждении основано на том, что после отключения АД от сети его электромагнитное поле затухает (исчезает не мгновенно) в течение некоторого, пусть и небольшого интервала времени. За счет энергии этого затухающего поля и использования специальных схем включения АД можно обеспечить его самовозбуждение и реализовать тормозной режим. На практике применение нашли так называемые конденсаторное и магнитное торможение АД.
При конденсаторном торможении, схема которого приведена на рис. 5.38, а, возбуждение АД 1 осуществляется с помощью конденсаторов 2, подключаемых к статору. Определяющим фактором, от которого зависят вид и расположение характеристик АД 1 ...3 (см. рис. 5.38, б), а значит, интенсивность торможения, является емкость конденсаторов С (кривые 1...3 соответствуют значениям С1< С2< С3). Чем она больше, тем больше будет максимум тормозного момента, а характеристики будут смещаться в область низких скоростей АД.
Магнитное торможение реализуется после отключения статора двигателя от сети и замыкания с помощью контактов его выводов накоротко. За счет запасенной в двигателе электромагнитной энергии происходит самовозбуждение двигателя и на его валу создается тормозной момент. Особенностью такого торможения является быстротечность, определяемая небольшим временем затухания магнитного поля двигателя, однако возникающие тормозные моменты достаточно велики и обеспечивают интенсивное торможение ЭП.
Практические возможности торможения АД существенно расширило использование тиристорных регуляторов напряжения, которые позволяют осуществлять как пуск двигателя, так и его торможение. Для обеспечения интенсивного торможения двигателя часто используется комбинированный способ, например динамическое торможение в сочетании с торможением коротким замыканием. Этот способ может быть реализован тиристорным устройством.