Мехатронні системи автомобільного транспорту
Мехатроника виникла як комплексна наука від злиття окремих частин механіки і мікроелектроніки. Її можна визначити як науку, що займається аналізом і синтезом складних систем, в яких однаковою мірою використовуються механічні і електронні керівники пристрою.
З наземних видів транспорту автомобільний транспорт є самим комп'ютеризованим(за винятком транспортних роботів). Вже зараз до 40 % вартості легкового автомобіля визначається електронними компонентами і програмним забезпеченням, а 90 % усіх нововведень в автомобілі пов'язані саме з електронними системами. У сучасних легкових автомобілях преміум класу налічується до 70 процесорів, а при створенні електронних систем нового автомобіля від 50 % до 70 % витрат доводиться на програмне забезпечення. По суті сучасний автомобіль - це той же комп'ютер, тільки на колесах.
Життєво важливі функції управління автомобілем - управління двигуном, гальмами, рульовим управлінням, системами безпеки - обслуговують спеціалізовані відмовостійкі операційні системи реального часу.
На Рис. 3.19 зображений загальний вигляд сучасного легкового автомобіля і його основні системи управління.
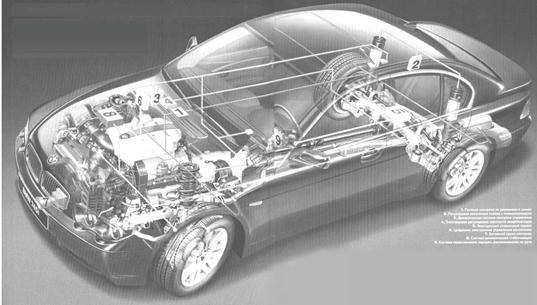
Рис. 3.19 Загальний вигляд сучасного автомобіля : 1 - система контролю за тиском в шинах; 2 - регулювання положення кузова з пневмоприводом; 3 - динамічна система контролю управління; 4 - електронне регулювання жорсткості амортизаторів; 5 - електронне гальмо стоянки; 6 - цифрова електроніка управління двигуном; 7 - активний круїз-контроль; 8 - система динамічної стабілізації; 9 - система перемикання передач, розташована на кермі
Усі мехатронные системи автомобілів по функціональному призначенню ділять на три основні групи:
- системи управління двигуном;
- системи управління трансмісією і ходовою частиною;
- системи управління устаткуванням салону.
Система управління двигуном підрозділяється на системи управління бензиновим і дизельним двигуном. За призначенням вони бувають монофункціональні і комплексні.
У монофункціональних системах ЭБУ подає сигнали тільки системі уприскування. Уприскування може здійснюватися постійно і імпульсами. При постійному поданні палива його кількість міняється за рахунок зміни тиску в топливопроводе, а при імпульсному - за рахунок тривалості імпульсу і його частоти.
У комплексних системах один електронний блок управляє декількома підсистемами: уприскування палива, запалення, фазами газорозподілу, самодіагностики та ін.
Система електронного управління дизельним двигуном контролює кількість палива, що упорскує, момент початку уприскування, струм факельної свічки і тому подібне
У електронній системі управління трансмісією об'єктом регулювання є головним чином автоматична трансмісія. На підставі сигналів датчиків кута відкриття дросельної заслінки і швидкості автомобіля ЭБУ вибирає оптимальне передатне число трансмісії, що підвищує паливну економічність і керованість.
Розвиток електронних систем управління двигуном і трансмісією привів до поліпшення експлуатаційних властивостей автомобіля.
На Рис. 3.20 показаний приклад електронної системи управління трансмісією автомобіля. На підставі сигналів датчиків ЭБУ виробляє команди на включення і виключення зчеплення. Ці команди подаються на електромагнітний клапан, який здійснює включення і виключення приводу зчеплення. Для перемикання передач використовуються два електромагнітні клапани. Поєднанням станів «открыт-закрыт» цих двох клапанів гідравлічна система задає чотири положення передач (1, 2, 3 і передача, що підвищує). При перемиканні передач зчеплення вимикається, виключаючи тим самим наслідки зміни моменту, пов'язаного з перемиканням передач.
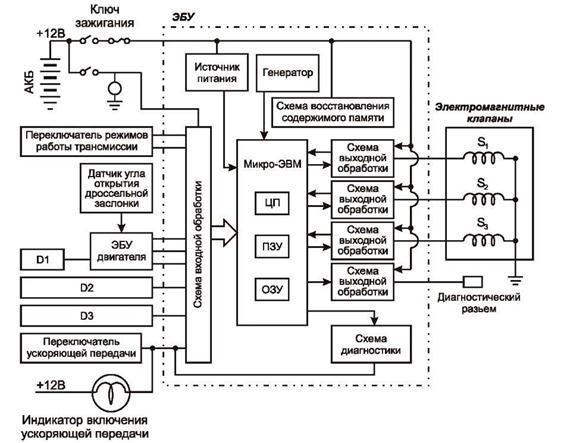
Рис. 3.20. Система управління трансмісією: Dj - датчик температури охолоджувальної рідини; D2 - датчик швидкості автомобіля, встановлений в спідометрі; D3 - датчик швидкості автомобіля, встановлений в автоматичній трансмісії
Закони управління(програми) перемикання передач в автоматичній трансмісії забезпечують оптимальну передачу енергії двигуна колесам автомобіля з урахуванням необхідних тягово-швидкісних властивостей і економії палива. При цьому програми досягнення оптимальних тягово-швидкісних властивостей і мінімальної витрати палива відрізняються один від одного, оскільки одночасне досягнення цих цілей не завжди можливе. Тому залежно від умов руху і бажання водія можна вибрати за допомогою спеціального перемикача програму «економія» для зменшення витрати палива, програму «потужність» - для поліпшення тягово-швидкісних властивостей або програму «ручне», щоб перейти на перемикання передач водієм.
Управління ходовою частиною включає управління процесами руху, зміни траєкторії і гальмування автомобіля. Вони впливають на підвіску, рульове управління і гальмівну систему, забезпечують підтримку заданої швидкості руху.
Управління устаткуванням салону покликаний підвищити комфортабельність і споживчу цінність автомобіля. З цією метою використовуються кондиціонер повітря, електронна панель приладів, мультифункцио- нальная інформаційна система, компас, фари, склоочисник з переривчастим режимом роботи, індикатор ламп, що перегоріли, облаштування виявлення перешкод при русі заднім ходом, протиугінні пристрої, апаратура зв'язку, центральне блокування замків дверей, стеклоподъемники, сидіння зі змінюваним положенням, режим безпеки і т. д.
Розглянемо антиблокувальну систему автомобіля(АБС) як приклад системи активної безпеки(САБ), яка є найбільш наукомістким компонентом сучасного автомобіля.
У загальному випадку САБ можуть бути класифіковані по своєму функціональному призначенню (Рис. 3.21).

Рис. 3.21. Функціональна класифікація систем активної безпеки
У основу роботи будь-якої АБС закладений принцип циклічного збільшення і зменшення гальмівного моменту, що підводиться до коліс автомобіля, для утримання оптимальної області прослизання в місці контакту шини з дорожньою поверхнею.
Як відомо, повне прослизання або блокування колеса погіршує керованість і стійкість автомобіля, знижує ефективність гальмування і істотно підвищує знос шин. Такий підхід до роботи АБС автомобіля співпадає з автоматичним управлінням гальмування літака при посадці.
Найважливішою характеристикою для роботи АБС є залежність коефіцієнта зчеплення колеса ц від відносного прослизання колеса S (Рис. 3.22).
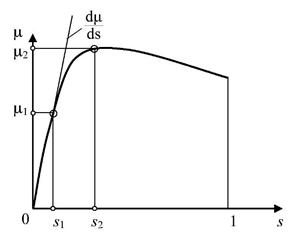
Рис. 3.22 Залежність коефіцієнта зчеплення колеса від коефіцієнта відносного прослизання(з нанесеними характерними точками)
Це пояснюється тим, що головна мета АБС-регулювання полягає у збереженні властивостей керованості і стійкості автомобіля при одночасному забезпеченні високого рівня гальмівної активності(за рахунок підвищення або пониження тиску в гальмівній системі). Межа виконання цих умов знаходиться в області екстремуму ц-S кривих, яка в ідеальному випадку і є регулювальною областю.
Характеристики ц(5) не має однозначного аналітичного опису і визначається експериментально в цілях подальшого використання в алгоритмах автомобільних систем управління. З визначенням параметрів ц і S є ряд принципових труднощів.
У лабораторних умовах p - S- криві знімаються за допомогою стендів, на яких колесо котиться по поверхні барабана з радіусом, що у декілька разів перевищує радіус колеса. Для визначення p - S- кривих в реальних дорожніх умовах в основному застосовуються так звані динамометричні автопоїзда, зазвичай у складі автомобіля і візка, сполученого з ним.
Невисока достовірність отриманих цими методами результатів зажадала розвитку альтернативних інформаційно-вимірювальних джерел для оцінки взаємодії колеса з дорогою. Серед них можна виділити технології віртуального і апаратного визначення параметрів зчеплення колеса з дорогою.
Віртуальні технології базуються на непрямому алгоритмічному визначенні ц за рахунок обробки інформації, отриманої від датчиків частоти обертання колеса, тиску в гальмівній системі, переміщення підвіски, кута повороту керованих коліс, інерціальної швидкості, а також акселерометров. Алгоритм визначення ц закладається в електронний блок управління.
Існує три віртуальні підходи у визначенні зчеплення колеса з дорогою: динамічний метод, статистичний метод і метод нечіткої логіки.
При динамічному методі інформація про коефіцієнт зчеплення виводиться з моделі руху автомобіля, закладеної в електронний блок управління. Вхідною інформацією для моделі служать отримувані апаратно параметри швидкостей обертання коліс, інерціальній швидкості автомобіля відносно вертикальної осі тиску в гальмівній системі, кут повороту керованих коліс.
Статистичний метод базується на кореляційних і регресійних моделях, які можуть бути побудовані за результатами попередніх випробувань автомобільних шин на різних типах дорожніх покриттів. В результаті в електронний блок системи управління закладається база даних ц-5-кривых або їх характерних показників і ц2.
Метод нечіткої логіки базується на побудові функцій приналежності вхідних і вихідних параметрів шляхом завдання бази продукційних правил їх взаємодії, вибору методів фаззификации, дефаззификации і алгоритму нечіткого виведення.
Апаратне визначення параметрів зчеплення колеса з дорогою припускає пряму оцінку сил зчеплення за допомогою датчиків. Проте досі не сформульований однозначний підхід до вирішення цієї проблеми.
Прямий, безпосередній вимір параметрів зчеплення базується на використанні різних фізичних ефектів, що дозволяють оцінити трибологические процеси в парі «шина - опорна поверхня».
Серед рішень, що пропонувалися в різний час, можна відмітити датчики, що визначають структуру дороги через інфрачервоне або СВЧ-излучение, або по ефекту Доплера. Фактично вони є системами, що монтуються на рамі транспортного засобу, і скануючі поверхню дороги. В результаті можуть бути виміряні параметри мікропрофілю дороги, по яких електронний блок управління розраховує значення коефіцієнта зчеплення. До істотних недоліків таких систем слід віднести чутливість до дії зовнішнього середовища, а також високу вартість.
Рішеннями, що заслуговують на увагу, є комплексні сенсорні системи, в яких основним елементом є ультразвуковий датчик, що монтується на рамі в передній частині автомобіля. Він складається з джерела, передавального хвилеві сигнали в ультразвуковому діапазоні, і приймача сигналів, відбитих від поверхні дороги.
Оскільки частина передаваного сигналу абсорбується дорогою, то має місце зворотна пропорціональність між кількістю абсорбованого випромінювання і «оптичною» щільністю дороги. Параметри «оптичної» щільності дорожнього покриття можуть бути потім перераховані в коефіцієнт тертя по відомих з трибологии залежностях.
Із-за нерівностей дороги частина посланого ультразвукового сигналу може розсіюватися, тому для корекції паралельно встановлюють лазерний датчик, що дозволяє оцінювати геометрію дорожньої поверхні. Конструктивно він так само виконаний у вигляді джерела і приймача сигналу. Вплив мікропрофілю дороги і коливань автомобіля враховують за допомогою датчиків вібрації рами і тиску в шині. На їх основі у блоці обробки інформації проводиться фільтрація параметрів, отриманих від ультразвукового і лазерного датчиків. При остаточному розрахунку коефіцієнта зчеплення здійснюється додаткова корекція з урахуванням температури(Г-сенсор) і вологості(М-сенсор).
Недоліком подібних сенсорних систем є їх висока вартість, хоча розвиток нових сенсорних технологій в найближчому майбутньому повинен привести до створення подібних пристроїв, прийнятних для установки на серійні автомобілі. Недослідженим питанням для цих систем є баланс між точністю і швидкодією, тому в найближчій перспективі їх доцільно застосовувати для періодичного визначення коефіцієнта зчеплення в процесі руху автомобіля.
Принцип доэкстремального управління базується на відстежуванні оптимальної по зчепленню області роботи колеса, і параметром регулювання може бути похідна d^/dS. В цьому випадку відстежується оптимальна по зчепленню область роботи колеса - область екстремуму ц^-кривых(Рис. 4.75), одночасно як по напряму зміни ц, так і S.
Найбільш простий варіант доэкстремального принципу управління АБС полягає в завданні постійних порогів спрацьовування для підвищення і пониження тиску в гальмівній системі по аналогії із звичайними системами. Поріг на зменшення гальмівного тиску вибирається в доэкстремальной області(див. Рис. 4.75), виходячи, наприклад, із статистичної обробки ц-S кривих. Поріг на чергове підвищення гальмівного тиску контролюється по граничній умові d^/dS = 0, т. е. по екстремуму.
Змінні пороги спрацьовування можуть підвищити адаптивні властивості
АБС. Їх визначення базується на обліку потенційних FP і реальних FM сил в контакті колеса з дорогою (Рис. 3.23).
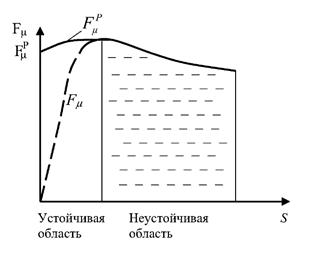
Рис. 3.23 Потенційні і реальні сили в контакті колеса з дорогою
Інформація про dF^/dS може бути отримана безпосередньо за наявності в АБС датчика окружної сили або гальмівного моменту від окружної сили, або може контролюватися апаратно по звичайних датчиках тиски в гальмівному приводі і кутовій швидкості колеса. Таким чином, на відміну від попереднього алгоритму тут можуть бути застосовані принципи не лише дискретного, але і безперервного регулювання.
Алгоритм з прогнозуванням може бути використаний в інтелектуальних системах активної безпеки автомобіля. У його основі лежить оцінка потенційних і реальних сил в контакті колеса з дорогою (Рис. 3.23).
Потенційна сила в контакті колеса з дорогою F^ фактично описує межу, що визначає можливості по передачі гальмівних сил від дороги на автомобіль. Реальна сила Fи визначає поточну гальмівну силу в контакті колеса з дорогою. При додатку до колеса гальмівного моменту із зростанням прослизання колеса сила Fи за своєю абсолютною Т7р величиною прагне до F.
Сила Fи досягне свого потенційного значення до деякої точки, що відповідає екстремуму ^-S-кривой. По співвідношенню реальної і потенційної сил в контакті в стабільній області можна оцінити запас по стійкій роботі колеса, наприклад, через деякий коефіцієнт
Можна відмітити, що за відсутності поступальної ходи колеса KS = 1, а при досягненні їм потенційної межі KS = 0.
Таким чином, доэкстремальная АБС, що використовує алгоритм з прогнозуванням, одночасно відстежує запас по стійкості колеса і прогнозує наближення потенційної межі по зчепленню.
На Рис. 3.24 показана схема поетапної реалізації автомобільних САБ. Згідно з цією схемою усі системи активної безпеки(САБ) діляться на п'ять рівнів. Для переходу до кожного нового рівня мають бути виконані певні передумови. Їх умовно можна розбити на три гілки: аналітичну, інформаційну і інтелектуальну.
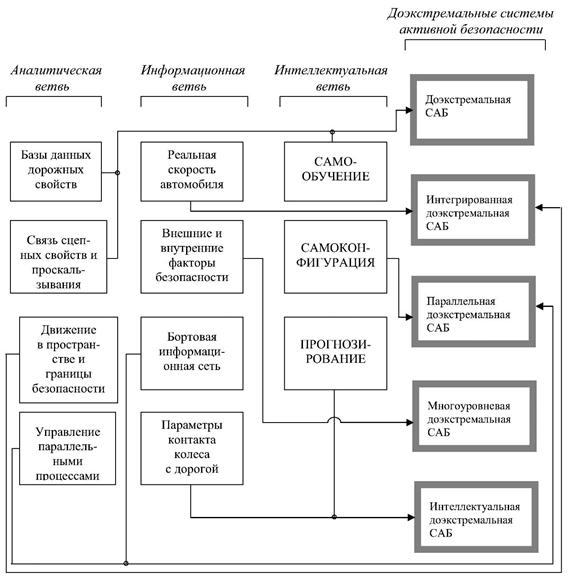
Рис.3.24 Розвиток доэкстремальных систем активної безпеки
До аналітичної гілки відносяться питання, пов'язані з розробкою необхідної теоретичної бази для доэкстремальных САБ.
Інформаційна охоплює створення і використання нових інформаційно-вимірювальних пристроїв для сенсорної частини САБ.
До інтелектуальної гілки відноситься введення в структуру системи певних логічних зв'язків.
Відповідно до схеми на Рис. 3.24 першим представником доэкстремальных САБ є системи для гальмівного або тягового режиму руху автомобіля (Рис. 3.25), для нормального функціонування яких рекомендується створення бази цих дорожніх властивостей і аналітичних залежностей зчіпних властивостей і прослизання колеса відносно дороги.
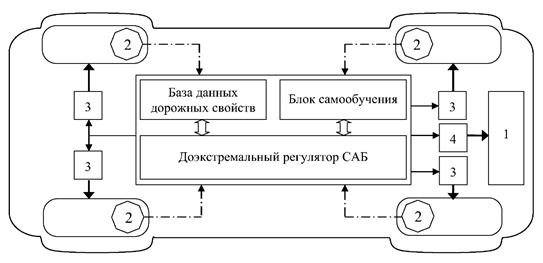
Рис. 3.25 - Елементи доэкстремальной САБ для гальмівного/тягового режиму руху автомобіля : 1 - двигун; 2 - датчики частоти обертання колеса; 3 - виконавчі апарати САБ для гальмівної системи(модулятори); 4 - виконавчі апарати САБ для управління двигуном
Розглянута нижче система є базою для наступного класу доэкстремальных САБ - інтегрованих доэкстремальных САБ (Рис. 3.26).
Головним елементом інтегрованого доэкстремального регулятора САБ в цій системі є аналітичний блок управління динамікою автомобіля. У основі його функціонування лежить взаємозв'язок параметрів просторового руху автомобіля і меж безпеки, що характеризують зчеплення колеса з дорогою.
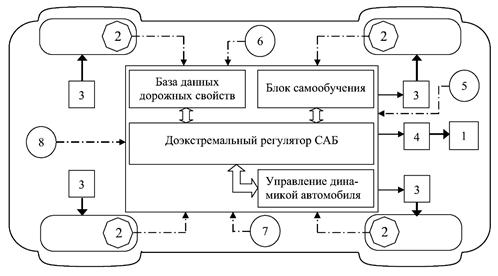
Рис. 3.26. Елементи інтегрованої доэкстремальной САБ: 1 - двигун; 2 - датчики частоти обертання колеса; 3 - виконавчі апарати САБ для гальмівної системи(модулятори); 4 - виконавчі апарати САБ для управління двигуном; 5 - датчик кута повороту рульового колеса; 6 - датчик інерційної швидкості обертання автомобіля; 7 - акселерометрический датчик; 8 - датчик швидкості автомобіля
У загальному випадку система оцінює просторовий рух автомобіля в поточних умовах і зіставляє його з безпечними межами за умовами зчеплення колеса з дорогою.
Істотним доповненням цієї системи є введення в інформаційну структуру датчика реальної швидкості автомобіля. Запропоновано оцінювати реальну швидкість автомобіля за допомогою нейронної мережі.
Для цього застосовується двошаровий персептрон, в якому нейрони першого шару мають функцію активації «гіперболічний тангенс», а нейрони другого шару - лінійну функцію активації. Перший шар складається з двадцяти нейронів, другий - з одного нейрона.
На Рис. 3.27 показана наступна САБ з елементами паралельної доэкстремальной САБ. Конструктивна частина паралельної САБ має бути доповнена датчиками тиску у виконавчих апаратах гальмівної системи, інформація від яких може бути перетворена у блоці управління САБ для отримання непрямих даних про сили і моменти, що передаються дорогою на колеса. Таким чином, система отримує декілька незалежних інформаційних каналів, які обов'язково повинні об'єднуватися бортовою інформаційною мережею.

Рис. 3.27- Елементи паралельної доэкстремальной САБ: 1 - двигун; 2 - датчики частоти обертання колеса; 3 - датчики гальмівного тиску; 4 - датчик кута повороту рульового колеса; 5 - датчик інерційної швидкості обертання автомобіля; 6 - акселерометрический датчик; 7 - датчик швидкості автомобіля; DATA I/O - обмін даними у бортовій інформаційній мережі
Введення img src="image152-200.jpg">
Рис. 3.28, а. Елементи багаторівневої доэкстремальной САБ: 1 - двигун; 2 - датчики частоти обертання колеса; 3 - датчики гальмівного тиску і тиску в шинах; 4 - датчик кута повороту рульового колеса; 5 - датчик інерційної швидкості обертання автомобіля; 6 - акселерометрический датчик; 7 - датчик швидкості автомобіля; 8 - датчики температури гальмівних механізмів; 9 - датчики зносу гальмівних накладок; 10 - датчики підвіски; 11 - датчики крену автомобіля; DATA I - обмін даними у бортовій інформаційній мережі

Рис. 3.28, б - Приклад структури інтелектуальної доэкстремальной САБ:
ИнтБлок - логічний блок самоконфигурирования і самонавчання алгоритму;
КорБЛОК - бік коригування алгоритмів; F^, F'£АБ - зусилля управління гальмівним механізмом від водія і від САБ відповідно; F - сила в контакті колеса з дорогою; F - потенційна сила в контакті колеса з дорогою; m - маса, приведена до колесу; Ы^ - момент, що розвивається гальмівним механізмом; p - гальмівний тиск; s - прослизання колеса; q - характеристики мікропрофілю дороги; Va - швидкість автомобіля; Vs - швидкість прослизання; Ор - кут повороту рульового колеса; d - кут курсового відведення; ц - питома сила в контакті колеса з дорогою(коефіцієнт зчеплення); Q - кут повороту коліс; WK - кутова швидкість колеса; ^ - інерційна швидкість повороту
У основу інтелектуальної доэкстремальной САБ закладається не управління за фактом початку критичної ситуації при русі автомобіля, а прогнозування граничних умов по безпеці в кожен момент часу, від моменту чіпання машини з місця і до її повної зупинки. Для цього САБ доповнюється апаратним або віртуальним визначенням параметрів контакту колеса з дорогою.
Принципові положення роботи інтелектуальної доэкстремальной САБ полягають в наступному:
• На підставі даних, отриманих по паралельних інформаційних каналах, відбувається розпізнавання маневру, що виконується автомобілем.
- З урахуванням швидкісного режиму машини і профілю дороги, визначуваних за допомогою датчика швидкості автомобіля і датчиків підвіски, відповідно, відбувається остаточне визначення поточних умов руху.
- Одночасно інформаційні канали коліс забезпечують розрахунок динамічних показників мікрорівня «колесо-дорога», які коригуються за інформацією від бази цих дорожніх умов. Окрім цього, генеруються аварійні пороги спрацьовування системи, які набудуть чинності при збої у визначенні доэкстремальных порогів САБ.
- Обробка динаміки взаємодії колеса з дорогою і показників поточних умов руху дозволяє визначити параметри прослизання колеса.
- Уся інформація, отримана на цьому етапі, поступає у блок прогнозування, який забезпечує розпізнавання дороги і розрахунок потенційних умов руху по зчепленню колеса з дорогою.
- На основі аналізу актуальних і потенційних параметрів руху коліс генеруються доэкстремальные пороги спрацьовування.
- Одночасно формуються превентивні сигнали управління для гальмівної системи і двигуна, що дозволяють почати те, що попереджує
регулювання у разі виникнення критичної ситуації. При цьому використовуються параметри з бази цих виконавчих пристроїв.
- Блок ухвалення рішень оцінює поточний стан, при необхідності виконує самоконфигурирование алгоритму управління, а також розставляє пріоритети в регулюванні з урахуванням доэкстремальных і аварійних порогів спрацьовування і превентивних сигналів управління.
- Таким чином, інтелектуальна доэкстремальная система активної безпеки дозволяє у будь-який момент часу змоделювати можливий розвиток дорожньої ситуації і почати попереджуюче регулювання.