Система управления
Д. Клиланд и В. Кинг определяют управление как "процесс, ориентированный на достижение определенных целей" [1.18].
С.Л. Оптнер считает управление целью обратной связи. "Обратная связь "воздействует" на систему. Воздействие есть средство изменения существующего состояния системы путем возбуждения силы, позволяющей это сделать" [1.27]. Действия обратной связи могут превзойти действия существующего входа системы в зависимости от места, времени, формы, интенсивности, содержания и длительности воздействия. Тот, кто решает проблему, должен вмешиваться в существующее состояние (ситуацию), чтобы выполнить свою цель. При всем многообразии форм воздействия их можно разделить на два класса: воздействия — изменения, приводящие к деградации, разрушению системы, уменьшению степени ее организованности, и воздействия — изменения, соответствующие развитию системы, увеличению степени организованности. Э.А. Смирнов считает, что "процесс организации отражает количественные и качественные изменения объекта управления на всех его фазах, этапах и стадиях. Если изменений нет, то нет и самого процесса"[1.35].
Следовательно, специалист или руководитель, разрабатывающий решение, должен позаботиться о рациональном наборе воздействий, чтобы добиться устойчивого процесса и достигнуть поставленной цели.
Процесс целенаправленного воздействия на систему, обеспечивающий повышение ее организованности, достижение того или иного полезного эффекта, и называется управлением.
Системы, в которых протекают процессы управления, называются системами управления.
Понятие системы управления впервые было введено в теории автоматического управления. Так, в сборнике рекомендуемых терминов по теории управления система управления определена как "система, состоящая из управляющего объекта и объекта управления" [1.36]. Например, автомобиль и водитель, самолет и его автопилот, командир и подразделение и т.д.
Поскольку управление — специфическая функция, то она реализуется определенными элементами системы. Система в процессе своего функционирования разделяется на управляющую и управляемую подсистемы. Действительно, если мы полагаем, что в системах не может быть бесцельных процессов, то очевидно, что если есть цель деятельности, должно быть управление достижением этой цели и сама деятельность по ее достижению.
Таким образом, налицо разделение функций управляющей и управляемой подсистем. Подобное разделение объективно необходимо; оно вызвано усложнением процессов деятельности во всех ее областях, постоянным ростом общественного характера деятельности, увеличением взаимосвязей различных процессов. Появляется необходимость согласования целей и усилий индивидуумов, коллективов предприятий, отраслей и т.д., управления их совместной деятельностью.
На рис. 1.12 представлена структура системы управления.
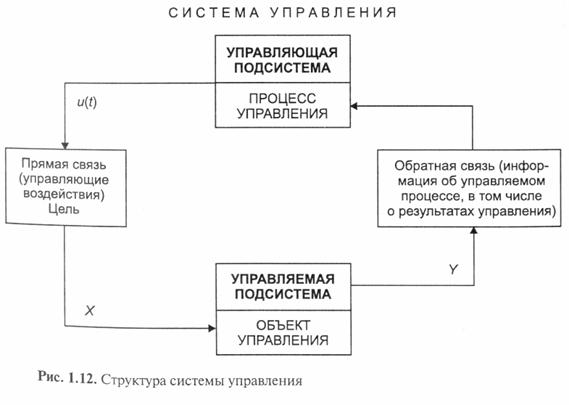
Система, формирующая управляющее воздействие и(t), называется управляющей подсистемой. Система, "испытывающая" на себе внешние воздействия, называется управляемой подсистемой (объектом управления). Обе эти системы в совокупности, с учетом их взаимодействия, образуют уже новую систему систему управления как совокупность двух подсистем (управляющей и управляемой).
Связь управляющей подсистемы с управляемой называется прямой связью. Такая связь имеется в любой без исключения системе управления (иначе не будет возможности управлять), противоположная по направлению действия связь (от управляемой подсистемы к управляющей) называется обратной связью.
Понятие обратной связи является фундаментальным в технике, природе и обществе.

На рис. 1.13 показан процесс возникновения механизма управления и обратной связи.
В работе А.А. Ларина [1.20] цель определяется как вариант удовлетворения исходной потребности, выбранный из некоторого множества альтернатив, сформулированных на основе специального знания.
Потребность — категория объективная, цель — субъективная, определяемая имеющимся опытом. Результат — это мера достижения конкретной цели, т.е. мера удовлетворения потребности. Цель есть конкретное выражение потребности, сформулированное на основе имеющегося опыта и определяющее конкретное функционирование создаваемой системы. Отсюда возникает причинно-следственная цепочка (рис. 1.14): потребность цель ® функционирование (управляемой) системы ® результат.

Удовлетворение потребности возможно альтернативными путями. Выбор альтернативного варианта связан с оценкой возможностей, т.е. определяется не только выбором определенной и конкретной совокупности методов и средств, обеспечивающих реализацию потребности в данных условиях.
Потребность — это то, что объективно связывает человека (и вообще твое) с внешней средой (миром, в том числе и социальным), некоторое (определяющее) условие обеспечения его жизнедеятельности.
Существование субъектов поддерживается возникновением и удовлетворением потребностей.
Для живого вообще потребность определяется как "объективно присущие живому организму требования условий, необходимых для его сохранения и развития".
Для людей потребности являются движущей "пружиной" поведения и сознания, определенной зависимостью человека от внешнего мира.
Цель — это совокупное представление о некоторой модели будущего результата, способного удовлетворить исходную потребность при имеющихся реальных возможностях, оцененных по результатам опыта.
Рассмотрим свойства цели:
1) цель находится в непосредственной зависимости от потребности и является в этом процессе ее прямым следствием;
2) выбор цели сугубо субъективен, т.е. основан на конкретном значении индивида или сообщества;
3) цель конкретна;
4) цель всегда несет в себе элемент неопределенности, что приводит к некоторому "рассогласованию" фактически полученного результата и той модели, которая была сформирована;
5) наличие неопределенности в исходной модели делает цель средством оценки будущего результата.
Система, формирующая управляющие воздействия и(t), называется управляющей подсистемой, а система, "испытывающая" на себе внешние воздействия управление (управляющие воздействия), называется управляемой подсистемой (объектом управления).
Воздействия управляющей системы на объект управления рассматриваются как процесс, как последовательная смена значений u(t). Элементы процесса управления системой показаны на рис. 1.15.
Управляющие воздействия направлены на то, чтобы функционирование (движение) системы управления способствовало достижению цели.
Из рис. 1.15 видно, что состояние выхода управляющей системы u(f) -вправляющего воздействия в любой момент времени t зависит от состояния г входов, которые являются выходами объекта управления Y(t — 1).
Следовательно, u(t) = Fy[Y(t1)].
Следует отметить, что управляющие воздействия во многом зависят от свойств управляющей системы (ее структуры, параметров и др.) — р:
u(t) = Fy(Y(t-1),р].

Рис. 1.15. Элементы процесса управления системой
Необходимо отметить важную отличительную особенность управляющей системы — ее непосредственная собственная цель не совпадает с целью управляемой системы.
Собственная цель управляющей системы-выработка управляющих воздействий u(t). Цели объекта управления могут быть разнообразными. Однако собственная цель управляющей системы не должна противоречить цели объекта управления. Объекты управления могут быть многоцелевыми и получать управляющие воздействия от нескольких управляющих систем.
На процесс выработки и осуществление управляющих воздействий оказывает влияние внешняя среда.
Реально в качестве факторов внешней среды могут выступать ресурсы, выделяемые для достижения цели управления, сведения об условиях функционирования объекта управления и др. Влияния внешней среды могут быть известными, случайными (неизвестными, непредсказуемыми) или неопределенными (неизвестными и непредсказуемыми).
Следовательно, закон управления в общем виде может быть представлен как
u(t) = Fy[Y(t1),р, x],
где F — закон управления для данной системы управления;
р — свойства управляющей системы;
x — свойства внешней среды.
Закон управления — правило (Fy) выработки управляющего воздействия с учетом особенностей (свойств и возможностей) (р) управляющей системы и учета степени влияния внешней среды (x).
В обобщенном виде закон управления -правило достижения цели управления.
Сущностью закона управления является нахождение функции Fy, т.е. оценка несоответствия выходов объекта управления Y(t-1) и модели объекта управления (модели результата).
Эффективность управления (управляющих воздействий) есть степень соответствия фактического или ожидаемого результата требуемому (желаемому), т.е. степень достижения цели.
Для оценки эффективности управления необходимо формализовать и измерить реальный (фактический или ожидаемый) результат Y и требуемый (желаемый) результат Ymp , которые включают множество частных показателей, позволяющих всесторонне оценить результат функционирования системы управления. Как правило, для многих практических задач принимается, что значение показателей, определяющих цель Ymp, фиксировано, а реальный результат Y будет зависеть от варьируемых частных показателей h, т.е. Y= Y(h).
Степень соответствия реальных результатов Y(h) поставленной цели Ymp предлагается оценить с помощью функции соответствия q = p(Y(h), Ymp), которая в общем случае может представлять собой вектор-функцию или характеризовать, например, расстояние между точками Y и Ymp или другую степень соответствия данных величин:
q(h)  Gmp,
Gmp,
где Gmp -множество требуемых (эффективных) значений показателей эффективности q, которым соответствуют значения определяемых характеристик h исследуемого объекта (системы, решения и т.п.).
При использовании критерия оптимальности требуется получить наилучшие (максимальные или минимальные) значения показателя. Однако в случае векторного показателя стремление максимизировать одни и минимизировать другие альтернативные компоненты вектора q может привести к множеству его значений, не различимых по предпочтению. В связи с этим наибольшее распространение получили два способа задания множества Gmp:
1) выделение множества значений векторного показателя q, не различимых по предпочтению;
2) определение оптимального (минимального или максимального) значения одного из частных показателей вектора q при ограничениях, накладываемых на остальные показатели.
В первом случае выделяемое множество Gn значений показателя называется множеством Парето, и критерий оптимальности будет иметь вид:
q(h) Gn, hn ,H,
где hn — Парето-оптимальные значения характеристик исследуемого объекта.
Множество Парето Gn может представлять собой дискретную или непрерывную совокупность точек в соответствующем n-мерном пространстве, и его определение производится с помощью специальных методов, используемых при поиске Парето-оптимальных решений многокритериальных задач.
Во втором случае при минимизации частного показателя q1, задается следующим образом:

где h* — оптимальное значение характеристик исследуемого объекта.
В случае применения единственного скалярного показателя g(h) критерий оптимальности принимает вид

Множество Gmp в этом случае вырождается, как правило, в единственную точку, соответствующую минимальному значению данного показателя.
Основные требования при выборе критерия:
1) поскольку критерий предназначен для сравнения, то он должен определять некоторый порядок на множестве альтернатив. Если критерий представляется функционалом, то это выполняется автоматически;
2) каждый критерий должен иметь четкий физический смысл и отражать целевое предназначение системы.