Относительность механического движения – это зависимость траектории движения тела, пройденного пути, перемещения и скорости от выбора системы отсчёта.
Движущиеся тела изменяют своё положение относительно других тел в пространстве с течением времени. Положение автомобиля, мчащегося по шоссе, изменяется относительно указателей на километровых столбах, положение корабля, плывущего в море недалеко от берега, меняется относительно береговой линии, а о движении самолёта, летящего над землей, можно судить по изменению его положения относительно поверхности Земли. Говорить о том, что какое-то тело движется, можно лишь тогда, когда ясно, относительно какого другого тела – тела отсчета, изменилось его положение. Пример того, как траектория движения тела зависит от выбора тела отсчета, приведен на рис. 1.
Наиболее яркими и важными для науки примерами зависимости траектории движения тела от выбранного тела отсчета являются траектории движения планет Солнечной системы. Когда мы смотрим на звездное небо, мы невольно считаем Землю неподвижной, и видимы траектории движения планет солнечной системы представляют собой запутанные кривые линии. Для объяснения движения планет по небесной сфере древнегреческий ученый Птолемей создал астрономическую систему мира, в которой за неподвижное тело отсчета принимается Земля. Такая система мира называется геоцентрической. Применяя геоцентрическую систему мира по Птолемею, в принципе можно рассчитывать положения планет на небесной сфере, но при этом необходимо производить такие сложные вычисления, что на практике эта система не применяется.
Польский ученый Коперник создал систему мира, в которой за неподвижное тело принимается Солнце. Такая система называется гелиоцентрической. В гелиоцентрической системе траектории движения планет являются эллипсами. Упрощение расчетов в результате применения гелиоцентрической системы мира позволило Кеплеру сформулировать свои знаменитые законы движения планет Солнечной системы. Затем Исаак Ньютон, анализируя законы Кеплера, открыл закон всемирного тяготения. Эти открытия было невозможно сделать в рамках геоцентрической системы мира.
Рассмотрим две системы отсчета, движущиеся друг относительно друга с постоянной скоростью v. Одну из этих систем, обозначенную на рис. 9 буквой k, будем условно считать неподвижной. Тогда вторая система k' будет двигаться прямолинейно и равномерно. Выберем координатные оси х, у, z системы k и оси х', у', z' системы k', так, чтобы оси х и х' совпадали, а оси у и у', а также z и z' были параллельны друг другу. Пусть точка M движется параллельно осям х и х'.
Найдем связь между координатами х, у, z точки M в системе k и координатами х', у', z' той же точки в системе k'. Если начать отсчет времени с того момента, когда начала координат обеих систем совпадали, то, как следует из рис. 9, х = х' + vt. Кроме того, очевидно, что y = y' и z = z'. Добавив к этим соотношениям принятое в классической механике предположение, что время в обеих системах течет одинаковым образом, т. е. что t = t', получим совокупность четырех уравнений:
 (12)
(12)
Эти уравнения называются преобразованиями Галилея. Первое и последнее из соотношений (12) оказываются справедливыми лишь при значениях v, малых по сравнению со скоростью света в пустоте, которую мы будем обозначать буквой с (v << c). При v, сравнимых со скоростью света в пустоте, преобразования, Галилея должны быть заменены более общими преобразованиями Лоренца. В рамках классической механики формулы (12) предполагаются точными.
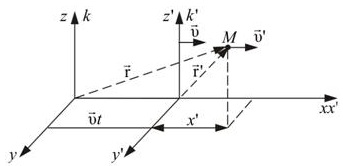
Рис. 9.
Преобразования координат при равномерном движении
Пусть  – скорость точки M в системе k', а
– скорость точки M в системе k', а  – скорость точки M в системе k . Чтобы найти связь между скоростями
– скорость точки M в системе k . Чтобы найти связь между скоростями  и
и  , продифференцируем соотношения (12) по времени:
, продифференцируем соотношения (12) по времени:
 (13)
(13)
Три скалярных соотношения (13) эквивалентны следующему соотношению между вектором скорости 
 по отношению к системе k и вектором скорости
по отношению к системе k и вектором скорости  по отношению к системе k':
по отношению к системе k':
 (14)
(14)
Чтобы убедиться в этом, достаточно спроектировать векторное равенство (14) на оси х, у, z. В результате получатся формулы (13).
Формулы (13) и (14) дают правило сложения скоростей в классической механике. Следует иметь в виду, что соотношение (14), как и любое другое векторное соотношение, остается справедливым при произвольном выборе взаимных направлений координатных осей систем k и k'. Соотношения же (13) выполняются только при выборе осей, показанном на рис. 9.