Лекция 3.
Кинематическое исследование рычажных механизмов методом планов скоростей и ускорений.
Для реализации этого метода, называемого еще графо-аналитическим, необходимо сначала построить кинематический план исследуемого механизма в заданном положении его начального звена (или начальных звеньев, если степень подвижности механизма больше двух). Под планом механизма понимают масштабное изображение его кинематической схемы. Масштаб линейных размеров, в котором строится план механизма, должен соответствовать одному из машиностроительных масштабов.
Для построения плана механизма необходимо знать линейные размеры всех звеньев, координаты осей неподвижных шарниров, положения осей поступательных кинематических пар и углы, координирующие положения начальных звеньев.
В тех случаях, когда кинематическое исследование проводится для нескольких различных положений механизма, допускается построение совмещенных планов механизма на одном чертеже.
План скоростей (ускорений) – это результат графического решения векторных уравнений, связывающих скорости (ускорения) средних точек групп Ассура со скоростями (ускорениями) их внешних точек. При решении этих уравнений графическим методом за начало векторов абсолютных скоростей (ускорений) точек принимают единую произвольно выбранную на чертеже точку, называемую полюсом плана скоростей (ускорений).
Под средними и внешними характерными точками групп Ассура II -го класса понимают характерные точки соответствующих кинематических пар, входящих в состав группы Ассура: средняя точка – это характерная точка внутренней (средней) КП, внешние – характерные точки внешних КП. Внешние характерные точки группы Ассура называют еще точками ее присоединения.
Характерной точкой вращательной КП (цилиндрического шарнира) является точка пересечения плоскости движения звеньев механизма с осью данного шарнира. Эта точка на оси вращательной КП в любой момент времени принадлежит обоим звеньям, участвующим в образовании данной КП.
Так, для группы Ассура II -го класса 1-го вида (рис. 1.18) точка В, ось внутреннего шарнира – это средняя характерная точка, а точки А и С, как оси внешних вращательных КП, являются внешними характерными точками или точками присоединения данной группы Ассура.

Рис. 1.18

Рис. 1.19
Несколько по-другому определяют характерные точки поступательных КП, хотя их тоже связывают с осями тех вращательных КП, которые входят в состав данной группы Ассура.
Характерной точкой поступательной КП является точка, принадлежащая одному из звеньев, образующих поступательную пару, и совпадающую в данный момент времени с осью шарнира группы Ассура, в образовании которого не принимает участия указанное выше звено поступательной пары.
В качестве примера рассмотрим группу Ассура II -го класса 3-го вида (Рис.1.18 б). Оси внешних шарниров А и В являются внешними характерными точками, а в качестве средней могут рассматриваться либо точка А3*), принадлежащая плоскости звена 3 и совпадающая в данный момент времени с осью шарнира А, либо точка В2, принадлежащая звену 2 и совпадающая с осью шарнира В на звене 3.
В группе Ассура II-го класса 5-го вида (Рис. 1.19) звено 3 представляет собой два жестко соединенных ползуна, направляющими для которых являются тела звеньев 2 и 4, причем звено 4 в состав этой группы Ассура не входит. Ось единственного в структурной группе шарнира А определяет положения всех трех характерных точек группы Ассура: средней точкой является точка А3, совпадающая с осью шарнира, но лежащая на плоскости звена 3, а точки А и А4 – это внешние характерные точки.
_________________________________________________
*) Здесь и далее нижний индекс у символа точки соответствует номеру звена, которому принадлежит эта точка, а символом без индекса обозначается ось шарнира, т.е. точка, принадлежащая одновременно двум звеньям, образующим эту вращательную КП.
Векторные уравнения, необходимые для построения планов скоростей и ускорений, составляют на основании теоремы о сложении скоростей и ускорений точки при сложном движении. Вид этих уравнений зависит от характера относительного движения рассматриваемых точек.
Если некоторые точки А и В (рис. 1.18 а) принадлежат одному и тому же звену и расстояние между ними в процессе движения остается неизменным, то эти точки совершают друг относительно друга вращательное движение. Векторные уравнения, связывающие скорости и ускорения этих точек, будут следующими:
 ;
;  ,
,
где  ,
,  ,
,  ,
,  – векторы абсолютных скоростей и ускорений точек А и В;
– векторы абсолютных скоростей и ускорений точек А и В;  – скорость движения точки В относительно точки А;
– скорость движения точки В относительно точки А;  ,
,  – нормальное (осестремительное) и тангенциальное (вращательное) ускорения точки В в относительном вращении вокруг точки А.
– нормальное (осестремительное) и тангенциальное (вращательное) ускорения точки В в относительном вращении вокруг точки А.
Если две точки принадлежат разным звеньям механизма, образующим поступательную КП, и в данный момент на плоскости механизма совпадают, например, точки А и А3 на рис.1.19, то векторные уравнения, связывающие их скорости и ускорения выглядят следующим образом:

 ;
; 
где  и
и  – скорость и относительное ускорение поступательного движения точки А3 относительно А, причем эти векторы параллельны, а вектор
– скорость и относительное ускорение поступательного движения точки А3 относительно А, причем эти векторы параллельны, а вектор  (кориолисово ускорение) перпендикулярен оси поступательной пары, образованной звеньями 2 и 3.
(кориолисово ускорение) перпендикулярен оси поступательной пары, образованной звеньями 2 и 3.
Так как группы Ассура II-го класса имеют по две внешних характерных точки, то для средней точки всегда можно составить два векторных уравнения, связывающих ее абсолютные скорости и ускорения со скоростями и ускорениями внешних точек. Однако, в тех случаях, когда одна из внешних характерных точек группы Ассура неподвижна, для отыскания скорости или ускорения средней точки часто достаточно одного векторного уравнения, связывающего скорости и ускорения средней и подвижной внешней точки. В этом случае нет необходимости во втором векторном уравнении.
Последовательность построения планов скоростей и ускорений
1. Структурным анализом устанавливают количество и последовательность наслоения групп Ассура в исследуемом механизме; определяют средние и внешние характерные точки каждой группы Ассура.
2. Строится план механизма в исследуемом положении.
3. Определяются скорости (ускорения) внешних точек первой в порядке наслоения группы Ассура; скорости (ускорения) точек присоединения группы Ассура к начальным звеньям устанавливают по заданному закону их движения, а скорость (ускорение) точки присоединения к стойке механизма равна нулю.
4. Составляется векторное уравнение, связывающее скорость (ускорение) средней точки группы Ассура со скоростью (ускорением) подвижной внешней точки. Выполняется анализ количества скалярных неизвестных в этом векторном уравнении. Если число скалярных неизвестных не превышает двух, то уравнение разрешимо однозначно и скорость (ускорение) средней точки находится в результате графического решения этого уравнения.
Если же число скалярных неизвестных в уравнении окажется больше двух, то дополнительно к первому составляют второе векторное уравнение, устанавливающее связь между скоростями (ускорениями) средней и второй внешней точки группы Ассура. Скорость (ускорение) средней точки определяют путем совместного графического решения двух векторных уравнений.
5. Определяют скорости (ускорения) точек присоединения второй в порядке наслоения группы Ассура, используя теорему подобия в кинематике без составления и решения каких-либо векторных уравнений.
Напомним, теорема подобия в кинематике твердого тела утверждает, что, если некоторые три точки принадлежат одному телу (звену механизма), то концы векторов абсолютных скоростей (ускорений) этих точек на плане скоростей (ускорений) образуют треугольники, абсолютно подобные тем, какие образуют эти точки на твердом теле или его плане, т.е. треугольники имеют не только пропорциональные стороны, но и характеризуются одинаковым направлением обхода их контуров.
6. Определяют скорость (ускорение) средней точки второй в порядке наслоения группы Ассура путем составления и графического решения соответствующих векторных уравнений.
Операции, описанные в пп.5 и 6 выполняют до исчерпания структурных групп звеньев, входящих в состав механизма, а все графические построения (план механизма, планы скоростей и ускорений) выполняют в определенных масштабах. При расчете длин отрезков, изображающих на чертеже некоторую величину (длину звена, линейную скорость или ускорение точки) используют формулу
 ,
,
где Н – натуральная величина изображаемого параметра, измеряемая в стандартных единицах; О – отрезок в мм, изображающий этот параметр; М – масштаб изображения данного параметра. Символ масштаба при этом снабжают нижним индексом l, v или w в зависимости от того, об изображении какого параметра идет речь.
Пользуясь планом скоростей, можно определить не только величины линейных скоростей движения отдельных точек механизма в исследуемом его положении, но и определить угловые скорости ведомых звеньев.
Масштаб плана ускорений  целесообразно принять таким, чтобы безразмерный коэффициент соотношения масштабов
целесообразно принять таким, чтобы безразмерный коэффициент соотношения масштабов  представлял некоторое целое число, либо единицу, деленную на целое число.
представлял некоторое целое число, либо единицу, деленную на целое число.
Построение планов скоростей и ускорений ведется в порядке присоединения групп Ассура к начальному механизму. Поскольку кривошипно-ползунный механизм имеет одну степень подвижности, то заданное движение входного звена (в данном случае кривошипа О1А) определяет движение всех остальных звеньев. Т.к. звено О1А совершает вращательное движение, то траекторией точки Аявляется окружность с центром в точке О1. Вектор скорости точки А направлен по касательной к траектории движения, т.е. перпендикулярно радиусу О1А, в сторону вращения кривошипа. Величина скорости определяется из выражения:
 ,
,
где wкр.- угловая скорость кривошипа, рад/с; r – радиус кривошипа, м.
Известный по величине и направлению вектор скорости `uА строят в виде отрезка произвольной длины рuа, из выбранного полюса рu- плана скоростей (рис. 3.9, б). Обычно полюс соответствует точке на плане механизма, движение которой известно – наиболее часто это – неподвижная точка, поэтому все неподвижные точки плана механизма совпадают с полюсом на плане скоростей и ускорений.
В этом случае масштаб плана скоростей:
 ,
,  .
.
При определении скорости точки В следует отметить, что ползун совершает возвратно-поступательное движение, т.е. траекторией его движения является прямая линия, а вектор её скорости направлен параллельно линии перемещения. Т.к. точка В одновременно принадлежит и ползуну, и шатуну, то для дальнейшего построения плана скоростей следует воспользоваться векторным уравнением, выражающим связь между скоростями точек А и В шатуна:
 ,
,
где  – вектор абсолютной скорости точки В;
– вектор абсолютной скорости точки В;  – вектор скорости переносного движения, скорости полюса в качестве которого принята точка А;
– вектор скорости переносного движения, скорости полюса в качестве которого принята точка А;  – вектор относительной скорости точки В по отношению к точке А (вектор вращательной скорости точки В вокруг полюса – точки А).
– вектор относительной скорости точки В по отношению к точке А (вектор вращательной скорости точки В вокруг полюса – точки А).
Внимание: чтобы отложить любой вектор нужно знать его величину и направление, поэтому, здесь, и далее вектор, известный по величине и направлению, подчеркнут двумя линиями, а вектор известный только по направлению, подчеркнут одной линией.
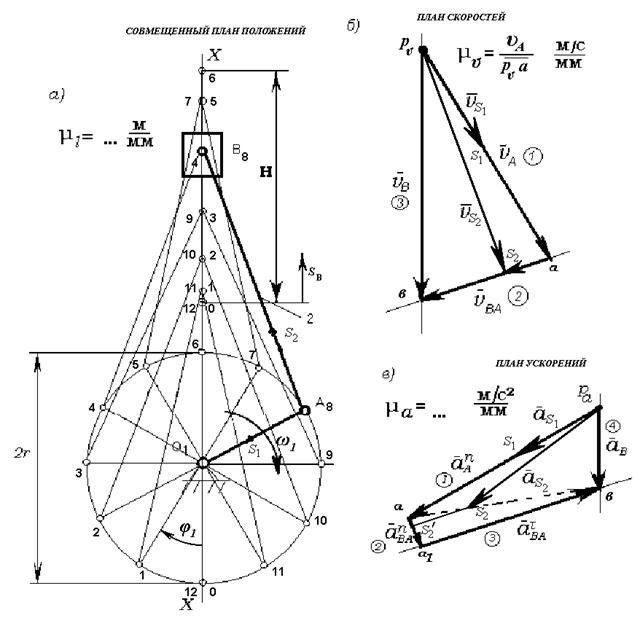
Рис. 1.20
В векторном равенстве две неизвестные величины: скорость uВ и относительная (вращательная) скорость uВА. Вектор абсолютной скорости направлен параллельно линии перемещения ползуна ХХ, а вектор относительной скорости – перпендикулярно радиусу вращения, т.е. перпендикулярно текущему положению шатуна АВ. Вектор переносной скорости (скорости полюса) на плане скоростей представлен отрезком рuа, поэтому данное векторное равенство можно решить графическим путем.
Через точку а вектора рuа проводят линию действия скорости uВА перпендикулярно АВ. Далее, в соответствии с векторным уравнением, через полюс плана скоростей рu проводят линию действия скоростиuВ параллельно линии ХХ перемещения ползуна. На пересечении линий действия скоростей uВА иuВ находим точку в, расстояние от которой до полюса плана в масштабе и определяет величины скоростей, м/с:
 ;
;  .
.
Зная относительную скорость точки В вокруг полюса точки А, можно определить угловую скорость шатуна, рад/с:
 ,
,
где uВА - м/с; l – длина шатуна, м.
Как определяют при помощи плана скоростей направление угловой скорости вращения некоторого ведомого звена, рассмотрим на примере звена 2. На плане скоростей находим вектор относительной скорости движения каких-либо двух точек, принадлежащих звену 2. Рассмотрим, например, движение точки В относительно оси шарнира А. Вектор (  ), соответствующий относительной скорости
), соответствующий относительной скорости  , с плана скоростей мысленно переносим на план механизма, совмещая начало вектора с точкой В на плане звена. Такое направление движения точки В относительно точки А возможно лишь в том случае, если угловая скорость звена 2 направлена в противоположную сторону вращения стрелки часов, т.е. в данном положении механизма
, с плана скоростей мысленно переносим на план механизма, совмещая начало вектора с точкой В на плане звена. Такое направление движения точки В относительно точки А возможно лишь в том случае, если угловая скорость звена 2 направлена в противоположную сторону вращения стрелки часов, т.е. в данном положении механизма  .
.
Теорема подобия фигур для планов скоростей: фигуры на плане положений и на плане скоростей образованные векторами относительных скоростей подобны. Рассмотрим треугольники на плане положений D01АВ и на плане скоростей Dрuав, они являются подобными как имеющими две стороны взаимно перпендикулярные друг другу и одну параллельную.
Для определения скоростей центров тяжести звеньев следует найти положения точек S1 и S2 на плане скоростей, воспользовавшись теоремой подобия составив соотношения:
 и
и  ,
,
т.е. абсолютная скорость  .
.
Чтобы получить абсолютную скорость точки S2 следует соединить точку s2 с полюсом плана скоростей рu, и тогда отрезок рus2 определит в масштабе плана mu скоростей абсолютную скорость центра тяжести шатуна. Истинное значение абсолютной скорости точки S2 определяем, м/с:
 .
.
Построение плана ускорений:
Построение плана ускорений необходимо начать с вычисления и нанесения на план ускорения т. А кривошипа. В общем случае полное ускорение т. А складывается из нормального (центростремительного)  и касательного
и касательного  ускорений:
ускорений:
 .
.
Численное значение нормального ускорения определяют по формуле, м/с2:
 .
.
Направлено это ускорение параллельно отрезку О1А от точки А к центру вращения О1.
Касательное ускорение определяется по формуле, м/с2:
 ,
,
где eкр – угловое ускорение кривошипа, с-2; r – длина кривошипа м.
Направлено ускорение перпендикулярно отрезку О1А, либо по направлению вектора скорости`uА (ускоренное вращение), либо против`uА (замедленное вращение).
Складывая геометрически нормальное и касательное ускорения, найдем полное ускорение точки А:

При равномерном вращении кривошипа (wкр=const) его угловое ускорение  , следовательно, полное ускорение точки А будет определяться только нормальной составляющей , имеющей численное значение:
, следовательно, полное ускорение точки А будет определяться только нормальной составляющей , имеющей численное значение:
 ,
,
Вычисленное нормальное ускорение изображаем на плане ускорений в виде отрезка раа произвольной длины, из выбранного полюса ра плана ускорений так, чтобы он был параллелен текущему положению кривошипа О1А и направлен от точки А к точке О1 (рис. 3.9, в). Тогда масштаб плана ускорений:
 ,
,  .
.
Далее переходят к определению ускорения точки В. В векторном виде:
 ,
,
где`аВ – вектор полного ускорения точки В ползуна и шатуна;`аА - вектор полного ускорения точки А кривошипа;`аВА - вектор относительного ускорения движения точки В шатуна по отношению к точке А кривошипа, которое можно разложить на нормальную (  ) и касательную (
) и касательную (  ) составляющие, направления которых известны (вектор направлен параллельно положению шатуна АВ от точки В к точке А, вектор направлен перпендикулярно вектору нормального ускорения). При известной вращательной скорости точки В вокруг полюса А (uВА), численное значение нормального ускорения определяют по формуле, м/с2:
) составляющие, направления которых известны (вектор направлен параллельно положению шатуна АВ от точки В к точке А, вектор направлен перпендикулярно вектору нормального ускорения). При известной вращательной скорости точки В вокруг полюса А (uВА), численное значение нормального ускорения определяют по формуле, м/с2:
 ,
,
здесь uВА - в м/с; l – длина шатуна в м.
Чертежное значение длины вектора равно  , мм.
, мм.
Следовательно, векторное уравнение может быть решено графическим путём.
Через точку апроводят прямую, параллельную текущему положению шатуна АiВi , и откладываем на ней вектор  в направлении от точки Вi к точке Аi. Затем через точку а1 проводят линию действия касательного ускорения, перпендикулярную данному положению шатуна. Из полюса плана ускорений ра проводят линию действия полного ускорения точки В, параллельную линии ХХ перемещения ползуна. Расстояние от точки в, пересечения линий действия двух последних ускорений до полюса и точки а1 определяет в масштабе значения ускорений, м/с2:
в направлении от точки Вi к точке Аi. Затем через точку а1 проводят линию действия касательного ускорения, перпендикулярную данному положению шатуна. Из полюса плана ускорений ра проводят линию действия полного ускорения точки В, параллельную линии ХХ перемещения ползуна. Расстояние от точки в, пересечения линий действия двух последних ускорений до полюса и точки а1 определяет в масштабе значения ускорений, м/с2:
 ;
;  .
.
Соединив точки а и ввектором  , получаем полное ускорение точки В в относительном движении по отношению к полюсу точке А, т.е.:
, получаем полное ускорение точки В в относительном движении по отношению к полюсу точке А, т.е.:
 , м/с2.
, м/с2.
Для определения ускорений центров тяжести звеньев следует найти положения точек S1 и S2 на плане ускорений, воспользовавшись соотношениями:
 и ,
и ,
Абсолютные значения ускорений центров тяжести звеньев, м/с2:
 и
и  .
.
Зная величину касательного ускорения  , можно определить угловое ускорение шатуна, с-2:
, можно определить угловое ускорение шатуна, с-2:
 .
.
Чтобы определить, какое движение совершает шатун (ускоренное или замедленное), необходимо знать направление угловой скорости w2 и углового ускорения e2 в данный момент времени. Для этого векторы вращательной скорости `uВА с плана скоростей и касательного ускорения с плана ускорений переносятся параллельно в соответствующую точку В плана положений механизма. Их направление относительно точки А и определит направление угловых скорости и ускорения. Если направление угловой скорости совпадает с направлением углового ускорения, то движение шатуна будет ускоренным и наоборот.
Планы скоростей и ускорений построенные для данного положения механизма, дают возможность установить лишь значения мгновенных скоростей и ускорений различных точек звеньев механизма, в соответствующее время.
Еще одна особенность плана скоростей и ускорений – построив их однажды, мы можем их использовать при любых значениях скоростей и ускорений начального звена, при этом будет меняться только масштаб плана и соотношения между векторами останутся постоянными до тех пор, пока не изменятся размеры звеньев.
Контрольные вопросы.