Дополнительные модули МК
Описанные выше модули составляют так называемый базовый комплект МК и входят в состав любого современного контроллера. Очевидна необходимость включения в состав МК дополнительных модулей, состав и возможности которых определяются конкретной решаемой задачей. Среди таких дополнительных модулей следует, прежде всего, отметить:
модули последовательного ввода/вывода данных;
модули аналогового ввода/вывода.
. Модули последовательного ввода/вывода
Наличие в составе 8-разрядного МК модуля контроллера последовательного ввода/вывода стало в последнее время обычным явлением. Задачи, которые решаются средствами модуля контроллера последовательного ввода/вывода, можно разделить на три основные группы:
связь встроенной микроконтроллерной системы с системой управления верхнего уровня, например, с персональным компьютером. Чаще всего для этой цели используются интерфейсы RS-232C и RS-485;
связь с внешними по отношению к МК периферийными ИС, а также с датчиками физических величин с последовательным выходом. Для этих целей используются интерфейсы I2C, SPI, а также нестандартные протоколы обмена;
интерфейс связи с локальной сетью в мультимикроконтроллерных системах. В системах с числом МК до пяти обычно используются сети на основе интерфейсов I2C, RS-232C и RS-485 с собственными сетевыми протоколами высокого уровня. В более сложных системах все более популярным становится протокол CAN.
. Модули аналогового ввода/вывода
Необходимость приема и формирования аналоговых сигналов требует наличия в МК модулей аналогового ввода/вывода.
Простейшим устройством аналогового ввода в МК является встроенный компаратор напряжения. Компаратор сравнивает входное аналоговое напряжение с опорным потенциалом VREF и устанавливает на выходе логическую "1", если входное напряжение больше опорного. Компараторы удобнее всего использовать для контроля определенного значения входного напряжения, например, в термостатах. В комбинации с внешним генератором линейно изменяющегося напряжения встроенный компаратор позволяет реализовать на МК интегрирующий аналого-цифровой преобразователь (АЦП).
Однако более широкие возможности для работы с аналоговыми сигналами дает АЦП, встроенный в МК. Чаще всего он реализуется в виде модуля многоканального АЦП, предназначенного для ввода в МК аналоговых сигналов с датчиков физических величин и преобразования этих сигналов в двоичный код. Структурная схема типового модуля АЦП представлена на рис 41
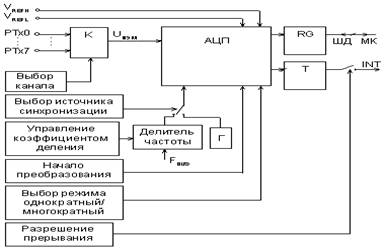
Рис. 41 Структура модуля АЦП.
Многоканальный аналоговый коммутатор К служит для подключения одного из источников аналоговых сигналов (PTx0...PTx7) ко входу АЦП. Выбор источника сигнала для преобразования осуществляется посредством записи номера канала коммутатора в соответствующие разряды регистра управления АЦП.
Два вывода модуля АЦП используются для задания опорного напряжения Uоп: VREFH — верхний предел Uоп, VREFL — нижний предел. Разность потенциалов на входах VREFH и VREFL и составляет Uоп. Разрешающая способность АЦП составляет Uоп/2n, где n — число двоичных разрядов в слове результата. Максимальное значение опорного напряжения, как правило, равно напряжению питания МК. Если измеряемое напряжение Uизм > VREFH, то результат преобразования будет равен FF, код 00 соответствует напряжениям Uизм < VREFL. Для достижения максимальной точности измерения следует выбрать максимально допустимое значение Uоп. В этом случае напряжение смещения нуля входного буфера и нелинейность передаточной характеристики АЦП будут вносить относительно малые погрешности.
Собственно аналого-цифровой преобразователь выполнен по методу последовательного приближения. Практически во всех моделях 8-разрядных МК разрядность АЦП также составляет 8 разрядов. Соответственно, формат представления результатов измерения АЦП — однобайтовый. Исключение составляют лишь модули АЦП микроконтроллеров для управления преобразователями частоты для электроприводов, разрешающая способность которых равна 10 разрядам. Два младших разряда результата получают с помощью дополнительного емкостного делителя, не связанного с регистром последовательного приближения.
Длительность такта преобразования задает генератор синхронизации: один цикл равен двум периодам частоты генератора tADC. Время преобразования для типовых модулей АЦП микроконтроллеров составляет от единиц до десятков микросекунд.