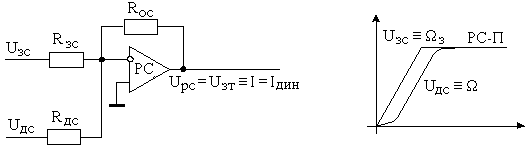
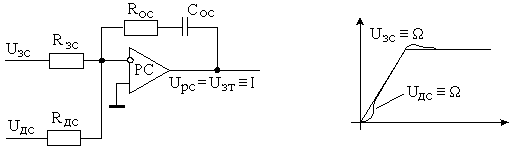
Особенность работы привода с П- и ПИ-регуляторами скорости при наличии задатчика интенсивности на входе
С П-регулятором скорости система является астатической по заданию первого порядка (см. рисунок 5.40а). В переходных режимах существует ошибка регулирования по заданию, которая становится равна нулю только в установившемся режиме.
 а)
а)
 б)
Рисунок 5.40
б)
Рисунок 5.40
|
 Рисунок 5.41
Рисунок 5.41
|
С ПИ-регулятором скорости система является астатической по заданию второго порядка (см. рисунок 5.40б). Рассогласование между задающим сигналом и сигналом датчика скорости имеет место в начале и в конце линейно изменяющихся задающих сигналов, необходимых для заряда и разряда Сос. В установившемся режиме разгона рассогласования нет.