Основные понятия теоретической ( общей) механики.
Теоретическая механика _ это наука об общих законах движения и равновесия материальных тел и возникающих при этом взаимодействиях между телами .
Для наиболее полного и простого описания движения общая механика прибегает к схематизации явлений, выделяя их наиболее существенные стороны. Поэтому она рассматривает движение не реальных тел, а некоторых абстрактных моделей, отражающих наиболее значимые их свойства . К числу такого рода моделей относятся: материальная точка, система материальных точек, абсолютно твердое тело, рычаг, кинематическая цепь и др.
Материальной точкой называется тело, определенной массы, размерами которой можно пренебречь в данных условиях. Например, за материальную точку можно принять молот ,ядро , мяч при изучении полета. Когда размерами тела пренебречь нельзя, можно мысленно разделить на части принять их за материальные точки. В этом случае само тело следует рассматривать как систему материальных точек.
Все физические тела под влиянием внешних сил деформируются. Если деформация тела незначительна и ею можно пренебречь, считая расстояния между его частицами неизменными, то такое тело называют абсолютно твердым.
В общей биомеханике изучаются движения абсолютно твердых тел, с которыми в природе мы не встречаемся. Однако практика подтверждает правильность следствий, вытекающих из законов теоретической механики.
- Скалярные и векторные величины.
Существует два рода физических величин. Такие величины как температура , время, масса, и т. п. характеризуются числом и называются скалярными величинами. Для характеристики таких величин как сила, скорость, ускорение численного значения недостаточно, нужно задать и их направление в пространстве. Такие величины называются векторами.
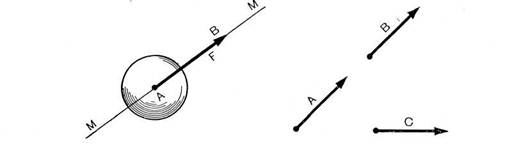
Всякая векторная величина графически изображается прямолинейным отрезком АВ длина которого в выбранном масштабе соответствует численному значению вектора , а направление совпадает с направлением действия силы, движением и т.п. и указывается стрелкой. Точка А и точка В отрезка АВ называются соответственно началом и концом
Для обозначения векторных величин часто применяют жирные буквы, а для скалярных — обычные. Иногда с целью подчеркнуть, что интерес представляет только модуль, букву, обозначающую вектор, ставят в прямые скобки. Так, например I F I— модуль вектора F, I АВ I—модуль вектора АВ.
Различают три типа векторов:
1. Векторы связанные, имеющие определенную точку приложения.
2. Векторы скользящие, за начало которых может быть принята
любая точка, лежащая на линии их действия. Скользящие векторы
можно переносить вдоль этой линии,
3. Векторы свободные, за начало которых может быть принята
любая точка пространства.
Два свободных вектора называются равными, если они имеют одинаковые модули и одинаковое направление (т. е. параллельны и направлены в одну сторону). Так, например, векторы А и В (рис. 2) — равные векторы. Векторы же А и С, хотя и имеют одинаковые модули, не равны, так как направления их различно
Биомеханика Лекция 4.