МАШИНЫ-АВТОМАТЫ
Первым этапом автоматизации производственных процессов явилась автоматизация рабочего цикла машины, создание машин-автоматов и полуавтоматов. На этом этапе основной конструкторской задачей является создание автоматически действующих механизмов холостых ходов и управления рабочим циклом.
Все бесконечное разнообразие конструкций и компоновок современных рабочих машин можно классифицировать по нескольким признакам, среди которых важнейшими являются:
1) технологическое назначение: токарные, шлифовальные, сборочные, намо-точные, ткацкие, печатные, упаковочные и т. п.;
2) степень универсальности: универсальные, специализированные и специаль-ные;
3) степень автоматизации: машины с ручным управлением, полуавтоматы и автоматы.
Кроме того, машины можно классифицировать по направлению геометрической оси (горизонтальные и вертикальные); по числу позиций (однопозиционные и много-позиционные); по принципу действия (последовательного, параллельного, последо-вательно-параллельного); по типу системы управления (работающие по упорам, копировальные, с распределительным валом, с программным управлением и т. д.).
Значительная часть этих признаков отражается в названиях машин, например, универсальный токарный станок, многошпиндельный токарный автомат, вертикальный многошпиндельный специальный токарный полуавтомат и т. д.
Для обработки одних и тех же изделий, как правило, могут быть спроектированы или использованы различные варианты машин, отличающиеся друг от друга степенью автоматизации, универсальностью, количеством позиций, принципом действия и т. д. Они отличаются технико-экономическими показателями, которые являются критериями их сравнительной оценки; основными их них являются: производительность, надёжность в работе, стоимость, количество обслуживающих рабочих, себестоимость эксплуатации.
Развитие автоматизации неизбежно связано с улучшением одних показателей, прежде всего с повышением производительности машин и сокращением количества обслуживающих рабочих и ухудшением других: увеличением стоимости, ремонтосложности, осложнением наладки и обслуживания.
Исторически первой группой машин по степени автоматизации явились универсальные станки с ручным управлением. При этом термин «станок» является обобщённым названием технологического оборудования, не только металлорежущего (гибочный станок, намоточный станок, ткацкий станок, печатный и др.). Главной особенностью универсальных станков с ручным управле нием является то, что рабочие операции выполняются машиной, а холостые ходы и управление последовательностью элементов рабочего цикла — человеком с помощью кнопок, рукояток, рычагов, штурвалов, маховиков и. т. д. Универсальные станки, история которых насчитывает много веков, постоянно совершенствуются и в настоящее время широко оснащаются средствами механизации и малой автоматизации для облегчения и ускорения ручных операций. Однако это не меняет их основного характерного признака — необходимости постоянного присутствия человека и его участия в выполнении рабочего цикла.
Преимуществом универсальных станков с ручным управлением является хорошая универсальность и мобильность, т. е. возможность быстрой переналадки на обработку других изделий. Основной недостаток — низкая производительность, что объясняется малым совмещением операций из-за ограниченных возможностей человека, обслуживающего станок. В некоторой степени повышение производительности универсальных станков с ручным у правлением достигается применением механизмов ускоренных перемещений, быстрозажимных патронов, копировальных приспособлений и т. д.
Каждый универсальный станок, как правило, обслуживается специальным рабочим; при этом возможности многостаночного обслуживания крайне ограничены.
 Специфические характеристики универсального неавтоматизированного оборудования обусловили его применение, прежде всего, в серийном и опытном производстве, где основной недостаток – низкая производительность – не играет решающей роли, а высокая универсальность и мобильность являются важнейшими требованиями к технологическому оборудованию. Однако тенденцией последних лет в связи с общим прогрессивным ростом масштаба производства являются поиски методов, средств автоматизации и налаживания серийного производства, что решается применением станков с цифровым программным управлением и другими путями.
Специфические характеристики универсального неавтоматизированного оборудования обусловили его применение, прежде всего, в серийном и опытном производстве, где основной недостаток – низкая производительность – не играет решающей роли, а высокая универсальность и мобильность являются важнейшими требованиями к технологическому оборудованию. Однако тенденцией последних лет в связи с общим прогрессивным ростом масштаба производства являются поиски методов, средств автоматизации и налаживания серийного производства, что решается применением станков с цифровым программным управлением и другими путями.
Универсальное неавтоматизированное оборудование было преобладающим во всех отраслях машиностроения до 20-х годов нашего столетия, когда увеличение масштабов производства, растущая потребность изготовления большого количества одних и тех изделий (часовая, автомобильная, подшипниковая промышленность обусловили широкое применение второй групп ы – универсальных автоматов и полуавтоматов. Их основное преимущество перед станками с ручным управлением – высокая производительность и значительные возможности многостаночного обслуживания. На рис. 1-5 показан конструктивный разрез универсального многошпиндельного токарного автомата последовательного действия с горизонтальной осью.
Обрабатываемые изделия закрепляются в нем в зажимных патронах шпинделей, которые смонтированы в шпиндельном блоке. Обработка производится с поперечных суппортов (на каждой позиции) и центрального продольного суппорта во время стоянки шпиндельного блока в зафиксированном положении. Периодический поворот шпиндельного блока обеспечивает последовательный подвод обрабатываемых изделий ко всем инструментам и их последовательную обработку – от черновой обточки до отрезка.
Программоносителем является распределительный вал, расположенный сверху, над шпиндельным блоком и суппортами. Каждый (целевой механизм рабочих и холостых ходов управляется от соответствующего кулачка, смонтированного на распределительном валу, через рычажные системы.
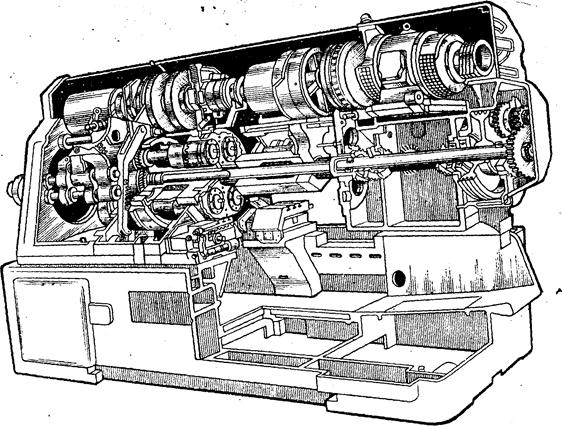
Рис. 1-5. Многошпиндельный токарный автомат
Рабочий цикл соответствует одному обороту распределительного вала и, следовательно, одному срабатыванию каждого из основных механизмов (суппорты, механизмы подачи и зажима обрабатываемого материала, поворота и фиксации шпиндельного блока и др.). За один цикл выдается одно готовое изделие и подается одна новая позиция обрабатываемого материала.
Кинематическая схема автомата приведена на рис. 1-6. Как показано на схеме и конструктивном разрезе, главный электродвигатель и основные передаточные механизмы расположены в правой стойке. Автомат имеет две кинематические цепи: от электродвигателя к шпинделям — цепь главного движения и от электродвигателя к распределительному валу — цепь подач.
Главное движение передается через гитару сменных шестерен, центральный вал, ось которого совпадает с геометрической осы автомата, и центральную шестерню, которая соединена со всеми шестернями шпинделей, расположенных по окружности. Привод распределительного вала обеспечивает две скорости его вращения, переключаемы дважды.
При последующем быстром вращении распределительного вала происходит быстрый подвод и отвод суппортов, поворот шпиндельного блока, подача и зажим материала. Эта цепь не имеет звена настройки, так как длительность данных холостых ходов зависит только от динамических характеристик данного автомата вне связи с наладкой на конкретную обрабатываемую деталь.
На этом автомате выполнятся операции обточки, расточки фасонирования, подрезки, отрезки, сверления, зенкирования, нарезания резьбы, т.е. полный комплекс, необходимый для обработки любой детали – тел вращения длиной, соизмеримой с диаметром. Однако, несмотря на наименование, универсальность этого автомата значительно ниже, чем универсальность токарного станка.
Это объясняется в первую очередь «узкой специализацией механизмов ходов. Так, если человек достаточно просто может закреплять в патроне токарного станка и прутковые и штучные заготовки, то в автомате для поковок, штамповок и штучных заготовок целевые механизмы подачи и зажимы пруткового материала уже непригодны – для этого необходимы иные механизмы с иной структурной схемой и принципом действия. 
Рис. I–6. Кинематическая схема многошпиндельного токарного автомата:
1 – механизм поворота шпиндельного блока; 2– поперечные суппорты; 3 – распределительный вал; 4– наладочный двигатель; 5 – главный двигатель; 6 – продольный суппорт; 7 – шпиндельный блок; 8 – транспортёр стружки
Универсальные автоматы превышают по производительности неавтоматизированные станки во много раз прежде всего благодаря использованию принципов совмещения отдельных рабочих и холостых ходов между собой. Так, в рассмотренном выше токарном многошпиндельном автомате все операции обработки в различных позициях совершаются одновременно и тем самым совмещаются между собой. В результате длительность холостых ходов цикла равна не суммарной длительности выполняемых операций, а времени самой продолжительной из них. Холостые ходы цикла совмещаются между собой (одновременный подвод и отвод всех суппортов) и с рабочими ходами (подача и зажим обрабатываемого материала) и при этом совершаются на высоких скоростях при быстром вращении распределительного вала.
В результате токарные многошпиндельные автоматы производительнее станков с ручным управлением до 20 раз. Однако это справедливо лишь при отсутствии переналадки, при обработке одних и тех же изделий, так как мобильность автоматов и полуавтоматов значительно хуже, чем неавтоматизированных станков. Так, переналадка автомата, показанного на рис. 1-5, занимает несколько часов и требует переналадки программоносителя — замены кулачков, копиров, а также регулировки рычажных передаточных систем; кинематической перенастройки — замены сменных шестерен; замены инструментов и технологической оснастки; регулировки механизмов и устройств — суппорта, зажимных механизмов и т. д.
Поэтому универсальные автоматы типичны для крупносерийного производства и массового производства с быстрой заменой объектов обработки; они широко применяются в различных отраслях машиностроения и приборостроении.
В условиях массового производства стабильной продукции отпадает необходимость в переналадке оборудования. При этом, как правило, весьма велики и масштабы выпуска, а следовательно, требования к производительности технологического оборудования, отсюда появление третьей группы машин — специализированных и специальных автоматов и полуавтоматов.
Специализированными называют рабочие машины, которые можно переналадить на обработку узкой группы однотипных изделий. Специальные станки, автоматы, полуавтоматы и автоматические линии проектируются в расчете на изготовление единственного конкретного изделия.
Высокая специализация позволяет значительно упростить конструкцию автоматов и полуавтоматов по сравнению с универсальным оборудованием за счет сокращения количества целевых механизмов, повысить режимы обработки благодаря высокой жесткости, применять оптимальные схемы обработки. Это обеспечивает дальнейшее повышение производительности машин.
В последние годы значительное количество новых образцов специализированного оборудования вызвано появлением новых прогрессивных методов обработки, прежде всего электрофизических и электрохимических методов, широкое распространение которых обусловлено появлением новых типов изделий, которые не могли быть получены с помощью методов классической технологии. Это относится в первую очередь к электронной промышленности, где постоянно действующие тенденции микроминиатюризации изделия потребовали комплекса методов микрообработки.
На рис. 1-7 показана принципиальная схема полуавтоматической установки электроннолучевой размерной обработки в изделиях. Обработка производится в вакууме в специальной камере, куда на специальный стол помещаются обрабатываемые плоские изделия.
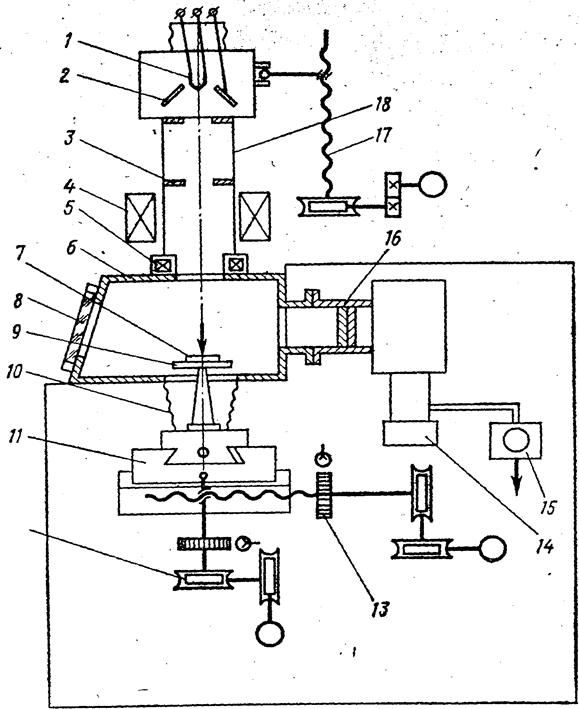 |
Рис.I-7. Схема электронно-лучевой установки размерной обработки:
1 - катод: 2 - фокусирующий электрод; 3- диафрагма; 4- фокусирующая система; 5 – отклоняющая система; 6- рабочая камера;7- обрабатываемое изделие; 8- смотровое окно; 9 – приспособление для закрепления изделий;10 – герметизирующий сильфон; 11 – координатный столик; 12 – привод перемещения; 13 – датчик положения; 14 – вакуумный агрегат; 15 – форвакуумный насос; 16 – вакуумная ловушка; 17 – механизм подъёма; 18- корпус ЭОС.
Агрегатные станки компонуются из разнотипных унифицированных механизмов и узлов с минимальным количеством оригинальных конструктивных элементов. Они предназначаются обычно для выполнения сверлильных, расточных операций; нарезания резьбы в отверстиях; фрезерования плоскостей, пазов и выступов. Многопозиционный агрегатный станок-полуавтомат имеет следующие основные функциональные узлы: силовые столы, несамодействующие силовые головки, шпиндельные коробки, поворотный стол с приводом поворота, боковые станины, вертикальные стойки, центральную станину.
Унификация возможна для тех узлов, функциональное назначение которых не зависит от конкретных обрабатываемых изделий.
Поэтому поворотные столы унифицированы в виде гаммы типоразмеров.
Стол унифицируют вместе с механизмом поворота и центральной (круглой) станиной, которая имеет стыковочные присоединительные поверхности для боковых станин и стоек, на которых монтируют силовые узлы (столы, головки).
В результате проектирование агрегатных станков по разработанному технологическому процессу сводится, по существу, к проектированию шпиндельных коробок и приспособлений. Остальные узлы подбирают из имеющейся номенклатуры типоразмеров и компонуют в соответствии с типовыми компоновочными решениями, одно из которых показано на рис. 1-8.
Агрегатные станки решают проблемы автоматизации прежде всего массового производства, потому что, как правило, они не предусматривают переналадки на другие изделия.
Новым прогрессивным видом автоматизированного оборудования, которое получило широкое применение лишь в 60-е годы, являются станка с цифровым программным управлением, позволяющие решить проблемы автоматизации серийного производства.
В отличие от полуавтоматов и автоматов, в которых программоносителями являются кулачки (см. рис. 1-5) или упоры (рис. 1-8), в станках с цифровым программным управлением программа задается с помощью кодированной информации на магнитной пленке, перфокартах, перфолентах, считывается и преобразуется с помощью электронных систем.
В настоящее время программное управление применяется для автоматизации многих типов технологического оборудования, прежде >всего металлорежущего (токарные, фрезерные, сверлильные, расточные), а также оборудования для электрофизических и электрохимических методов обработки (электроискровое, электроннолучевое и т. д.).
Принципиальной особенностью станков с программным управлением является не только высокая мобильность благодаря легкости замены программоносителей, но и повышение степени автоматизации. В этом отношении характерными являются многооперационные станки с цифровым программным управлением, которые в литературе часто называют обрабатывающими центрами.
На рис. 1-9 показан общий вид многооперационного станка с цифровым программным управлением и автоматической заменой инструмента. Станок имеет магазин, в котором помещается комплект инструмента, необходимый для обработки, и механизмы для автоматической замены инструмента в шпинделе по заданной программе. Это дает возможность производить автоматически за один установ весь цикл обработки самых сложных корпусных изделий с выполнением операций фрезерования, расточки, сверления, зенкерования, нарезания резьбы и т. д. Коробки скоростей и подач обеспечивают автоматическое переключение во время холостых ходов, что позволяет на всех операциях применять оптимальные режимы обработки. Многооперационные станки с программным управлением, как правило, имеют два стола, что позволяет совме-
щать снятие обработанных изделий.
Несмотря на то, что многооперационные станки с цифровым программным управлением являются одноинструментальными (станок имеет один шпиндель), одновременно в работе может находиться только один инструмент), их производительность намного выше, чем у соответствующего универсального неавтоматизированного оборудования (например, расточных станков). Сокращение рабочих ходов достигается благодаря комплексной оптимизации режимов; холостые ходы по сравнению с ручным обслуживанием уменьшаются за счёт высокой скорости позиционирования, быстрой замены инструмента, предварительно настроенного на размер обработки, минимального времени на подвод и отвод инструментов.
Таким образом, станки с цифровым программным управлением сочетают высокую производительность, присущую полуавтоматам и автоматам, с высокой мобильностью, характерной для универсальных станков. Их создание и внедрение явилось новым этапом в развитии мирового автоматостроения.
Высшей формой автоматизированного производства на первом этапе являются поточные линии из полуавтоматов и автоматов, где основные
технологические процессы обработки выполняются автоматически, а межстаночная транспортировка, накопление заделов, контроль качества обработанных изделий, удаление отходов выполняются вручную. В поточных линиях из полуавтоматов кроме того, вручную выполняются операции загрузки-выгрузки обрабатываемых изделий.
Лекции 1 и 2, раздел 10