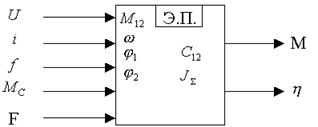
Математическое описание процессов.
электромеханических преобразований в асинхронном двигателе.
Классическая схема 2-х фазной электрической машины.
α, β – оси неподвижного статора
d, q – оси вращающегося ротора с углом поворота  .
.
U, V – свободно вращающиеся оси с углом поворота 
- угол поворота осей U, V относительно статора.
При рассмотрении 2-х фазной электрической машины с позщем электрической машины преобразования применительно к асинхронному двигателю:
 - уравнение статора
- уравнение статора
 - уравнение ротора
- уравнение ротора
 - уравнение момента
- уравнение момента

pn – количество пар полюсов.
i1R1 – падение напряжения;
 - противо э.д.с. от
- противо э.д.с. от  ;
;
 - противо э.д.с. от взаимодействия статора ритора
- противо э.д.с. от взаимодействия статора ритора
Im – проекция  на мнимую ось.
на мнимую ось.
L12 – взаимоиндуктивность статора и ротора;
 - мнимая составляющая
- мнимая составляющая 

 и
и  - оси неподвижного статора; d и q – оси вращающегося ротора с углом поворота
- оси неподвижного статора; d и q – оси вращающегося ротора с углом поворота  ; u и v – свободно вращающиеся оси с углом поворота
; u и v – свободно вращающиеся оси с углом поворота  - угол поворота осей u и v относительно статора; - угол поворота осей d и q жестко связанных с вращающимся ротором.
- угол поворота осей u и v относительно статора; - угол поворота осей d и q жестко связанных с вращающимся ротором.
При рассмотрении 2-х фазной электрической машины с позиции электромеханического преобразования применительно к асинхронному двигателю и при использовании понятий о комплексных числах уравнения электромеханического равновесия будут иметь вид:



Уравнение электрического равновесия для  включает в себя: падение напряжения от протекающего тока
включает в себя: падение напряжения от протекающего тока  , противо-ЭДС
, противо-ЭДС  от тока и противо-ЭДС взаимодействия статора и ротора.
от тока и противо-ЭДС взаимодействия статора и ротора.
 ;
;  - число пар полюсов;
- число пар полюсов;  - взаимоиндукция между статором и ротором;
- взаимоиндукция между статором и ротором;  - мнимая составляющая
- мнимая составляющая  .
.
Будем считать что частота вращения свободно вращающихся осей равна частоте вращения магнитного поля: 
Уравнения примут вид:


Рассмотрим схему замещения асинхронного двигателя:


Представим индуктивности статорной и роторной обмоток и индуктивность рассеяния:  ;
;  ;
;
 - реактивное сопротивление статорной цепи;
- реактивное сопротивление статорной цепи;
 - приведенное реактивное сопротивление ротора к статорной обмотке;
- приведенное реактивное сопротивление ротора к статорной обмотке;
 - реактивное сопротивление намагничивания.
- реактивное сопротивление намагничивания.


Векторная диаграма:

Статические характеристики асинхронного двигателя.

 - приведенный ток ротора к статорной цепи
- приведенный ток ротора к статорной цепи
- напряжение сети
 - приведенное сопротивление ротора к статорной цепи
- приведенное сопротивление ротора к статорной цепи
 - реактивное сопротивление короткого замыкания
- реактивное сопротивление короткого замыкания
Активная мощность машины:  (1)
(1)
Если подставить в формулу (1) и учитывая зависимость  получаем выражение для момента:
получаем выражение для момента: 
Если взять производную  и приравнять к нулю получим критическое значение S:
и приравнять к нулю получим критическое значение S: 

Критическое значение момента: 
Если  то можно пользоваться приближенным выражением:
то можно пользоваться приближенным выражением: 
Возможно получение формулы Клосса:  ;
; 
Механическая характеристика изменения момента в зависимости от скольжения:

 ;
; 
Представим механическую характеристику в другом виде:

Когда S будет больше 1 наступает режим торможения противовключением, уменьшается  и двигатель потребляет реактивную мощность в 5-10 раз больше номинальной и осуществляется мягкий режим торможения. При увеличении момента сопротивления до значения
и двигатель потребляет реактивную мощность в 5-10 раз больше номинальной и осуществляется мягкий режим торможения. При увеличении момента сопротивления до значения  имеется достаточно высокая жесткость статической характеристики статическое. При превышении моментом
имеется достаточно высокая жесткость статической характеристики статическое. При превышении моментом  момента происходит резкое снижение вращательного момента, двигательный режим переходит в генераторный и осуществляется такой режим торможения. Если
момента происходит резкое снижение вращательного момента, двигательный режим переходит в генераторный и осуществляется такой режим торможения. Если  станет больше
станет больше  то наступает генераторный режим реккупиративного торможения в котором скольжение меняет знак, часть энергии расходуется на тепло а остальная часть отдается в сеть.
то наступает генераторный режим реккупиративного торможения в котором скольжение меняет знак, часть энергии расходуется на тепло а остальная часть отдается в сеть.
Если будет больше  частота тока в роторе увеличивается,
частота тока в роторе увеличивается,  уменьшается и при некотором
уменьшается и при некотором  станет равным нулю, двигатель из сети не потребляет энергии и наступает режим динамического торможения. Далее если будет больше
станет равным нулю, двигатель из сети не потребляет энергии и наступает режим динамического торможения. Далее если будет больше  наступает режим сходный с режимом противовключения.
наступает режим сходный с режимом противовключения.
Двигатель с фазным ротором.

1. По формуле для момента видно что увеличение  приводит к увеличению этого момента.
приводит к увеличению этого момента.

2. Из формулы для  видно что если
видно что если  увеличивать то
увеличивать то  уменьшается и
уменьшается и  уменьшается.
уменьшается.

Поскольку потребляемый из сети ток  то
то  ; изменение напряжения приводит к изменению магнитного потока; изменение потока приводит к изменению тока намагничивания который при таких условиях может увеличиться даже до значения
; изменение напряжения приводит к изменению магнитного потока; изменение потока приводит к изменению тока намагничивания который при таких условиях может увеличиться даже до значения  и превысить его, хотя при нормальных условиях он менее
и превысить его, хотя при нормальных условиях он менее  . Т.е. при f1=const изменением напряжения сети можно управлять частотой вращения двигателя, так же как изменением потока в ДПТ.
. Т.е. при f1=const изменением напряжения сети можно управлять частотой вращения двигателя, так же как изменением потока в ДПТ.

3.

4. 
Меняя частоту – меняем индуктивное сопротивление , изменение приводит к изменению магнитного потока.
Если поддерживать постоянным и менять частоту то можно регулировать только в сторону увеличения . Чтобы регулировать в сторону уменьшения надо в соответствии с изменением частоты изменять напряжение питания. Тогда управление можно осуществлять по 2-м каналам – по каналу регулирования частотой и каналу регулирования магнитным потоком, изменяя . Это регулирование происходитм на участке 0<S<Sk.

Динамические характеристики асинхронного двигателя.
(1)
Считаем что напряжение сети постоянно и не зависит от мощности подключаемого двигателя. Т.к. преобразование энергии в ЭМП асинхронного двигателя осуществляется с использованием нелинейной зависимости (перемножение переменных) то для изучения динамических свойств делают линеализацию с использованием ряда Тейлора. Считается что  =const. Кроме того чтобы осуществить статику работы привода надо обеспечить постоянство потокосцепления
=const. Кроме того чтобы осуществить статику работы привода надо обеспечить постоянство потокосцепления  :
:  .
.
Тогда из уравнения (1) получим:  . Обычно в двигателе
. Обычно в двигателе 
 (p=1)
(p=1)
 - это отношение называется законом частоты при регулировании .
- это отношение называется законом частоты при регулировании .
Для обеспечения постоянства потокосцепления при регулировании скорости вращения частотой питающей сети нужно обеспечить  . При регулировании частотой взаимосвязь момента скольжения и питающего напряжения определяется выражением:
. При регулировании частотой взаимосвязь момента скольжения и питающего напряжения определяется выражением: 
 - эквивалентная постоянная времени определяющая инерционность электромагнитных процессов происходящих при передачи энергии от статора к ротору.
- эквивалентная постоянная времени определяющая инерционность электромагнитных процессов происходящих при передачи энергии от статора к ротору.
 - скорость вращения поля двигателя в режиме холостого хода при номинальной частоте питающей сети.
- скорость вращения поля двигателя в режиме холостого хода при номинальной частоте питающей сети.
 - абсолютное скольжение.
- абсолютное скольжение.
 и - скорости вращения поля статора и вала двигателя при любой частоте питающей сети.
и - скорости вращения поля статора и вала двигателя при любой частоте питающей сети.
 ;
;  ;
;
 - индуктивная составляющая статора при номинальной частоте сети.
- индуктивная составляющая статора при номинальной частоте сети.
 - приведенная индуктивная составляющая ротора при номинальной частоте питающей сети.
- приведенная индуктивная составляющая ротора при номинальной частоте питающей сети.
Выражение позволяющее построить упрощенную математическую модель асинхронного двигателя имеет такой вид: 
- модуль жесткости характеристики;
 ;
; 
Структурная схема будет иметь вид:


Если учитывать значение  то со снижением частоты f критический момент несколько снижается. Анализируя упрощенную математическую модель видно что на интервале механической характеристики при
то со снижением частоты f критический момент несколько снижается. Анализируя упрощенную математическую модель видно что на интервале механической характеристики при  переходные процессы происходят аналогично процессам для двигателя постоянного тока независимого возбуждения.
переходные процессы происходят аналогично процессам для двигателя постоянного тока независимого возбуждения.
Для АД критическое скольжение меняется от 0,05 до 0,5 и меньшее значение соответствует двигателям большей мощности.

Здесь меньшее значение  соответствует двигателям меньшей мощности.
соответствует двигателям меньшей мощности.
Регулирование скорости АД.
Обычно осуществляют такими способами:
1). Включением добавочного сопротивления в цепь ротора.
2). Изменением числа пар полюсов.
3). Изменением частоты питающей сети.
4). Нессиметричным питанием фазных обмоток и импульсным регулирова-нием.
Способы 1 и 2 на самостоятельную проработку.
Регулирование скорости вращения АД частотой питающей сети.

Если то  ;
; 
m - число фаз; - число пар полюсов;  - индуктивное сопротивление короткого замыкания.
- индуктивное сопротивление короткого замыкания.
 ;
; 

(1) – механическая характеристика;
(2) – исскуственная механическая характеристика.
С уменьшением частоты питающей сети уменьшается скорость вращения холостого хода двигателя, увеличивается критическое скольжение, увеличивается критический момент. При снижении частоты питающей сети рекомендуется соблюдать закон частоты U/f=const.
Один из вариантов регулирования скорости двигателя изменением частоты питающей сети:

Такая схема применяется в случае если необходима работа нескольких параллельных двигателей с разной частотой питающей сети. Возникает такая необходимость когда ДПТ неприменимы по условиям температуры, пожароопасности, запыленности.
Используется система Г-Д; вал генератора вращается внешним АД и при подаче возбуждения на генератор формируется ЭДС и прикладывается в виде напряжения к якорю двигателя. Он вращает вал синхронного генератора который вырабатывает 3-х фазную ЭДС с частотой f пропорциональной скорости вращения вала двигателя. Как рассмотрено ранее с уменьшением частоты СГ увеличивается момент и для сохранности его необходимо соблюдать закон частоты. Регулирование осуществляется изменением сопротивления реостатов R1 и R2. Особенности такого регулирования:
-возможность регулирования вверх и вниз;
-максимальный момент увеличивается с уменьшением частоты;
-если соблюдать закон частоты то момент будет постоянным;
-существенные потери при преобразовании частоты;
-громоздкость конструкции.
Схема регулирования частоты при помощи каскадных установок.

Такая схема применяется для двигателей мощностью до 1000кВт.
Первоначально ротор подключается с помощью Пр к добавочным сопротивлениям и запускается обычным путем, затем переключается Пр и в цепь ротора подается ЭДС снимаемая с с тиристорного преобразователя фазой противоположной фазе формируемого в роторе напряжения.

Нарастающий ток  снижается и затем постепенно двигатель переходит в номинальный режим с изменением сигналов со схемы управления.
снижается и затем постепенно двигатель переходит в номинальный режим с изменением сигналов со схемы управления.
Электромеханические преобразования в синхронном двигателе.

Синхронный двигатель представляется в виде 2-х фазной универсальной электрической машины.





Уравнения электрического равновесия по осям d и q:
 ;
;  ;
;
 ;
; 
 ;
; 
Совместное решение предыдущих уравнений дает влияние тока ротора по осям d и q:
 ;
; 
Уравнение момента для 2-х фазной машины:

Поскольку в рассматриваемом случае использовалось только две фазы для перехода к 3-х фазному питанию осуществляют преобразование координат (рис.1). После преобразования системы координат и перехода к 3-х фазному питанию имеем:

 |  |


Угловая характеристика:

Физика взаимодействия состоит :  ;
; 
Если не нагружен, т. е. работает в режиме холостого хода, угол  минималь-
минималь-
ный и влияние потока  минимально и влияет только поток возбуждения
минимально и влияет только поток возбуждения  .
.
С ростом нагрузки на двигатель влияние увеличивается и положение  изменится. В этом случае силы взаимодействия между потоком статора и эта связь отражается увеличением угла
изменится. В этом случае силы взаимодействия между потоком статора и эта связь отражается увеличением угла  . Эта связь может быть представлена в виде упругой связи подобно связи в механических системах и на небольших участках отклонения от установившегося значения можно представить:
. Эта связь может быть представлена в виде упругой связи подобно связи в механических системах и на небольших участках отклонения от установившегося значения можно представить:  ;
;  - упругость электромагнитной связи.
- упругость электромагнитной связи.

 - частота вращения поля статора; - частота вращения ротора.
- частота вращения поля статора; - частота вращения ротора.

Механическая характеристика: Структурная схема:

Основное достоинство СД – способность отдавать реактивную энергию в сеть в двигательном режиме:
 - реактивная составляющая потребляемого тока из сети.
- реактивная составляющая потребляемого тока из сети.
Если только  то
то  >0 т.е. реактивный ток потребляется из сети и угол сдвига фаз между напряжением и током сети
>0 т.е. реактивный ток потребляется из сети и угол сдвига фаз между напряжением и током сети  - ток отстает. Если увели-чивать ток возбуждения то Е увеличиться,
- ток отстает. Если увели-чивать ток возбуждения то Е увеличиться,  уменьшиться,
уменьшиться,  увеличить-ся, уменьшается и реактивная мощность потребляемая из сети падает. При
увеличить-ся, уменьшается и реактивная мощность потребляемая из сети падает. При 
 , вектор тока и напряжения совпадает по направлению и двигатель потребляет только активную мощность. Если
, вектор тока и напряжения совпадает по направлению и двигатель потребляет только активную мощность. Если  двигатель от-дает ток в сеть. Происходит компенсация реактивной энергии и снижает-ся оплата за электрическую энергию. Это режим работы двигателя как синх-ронного компенсатора.
двигатель от-дает ток в сеть. Происходит компенсация реактивной энергии и снижает-ся оплата за электрическую энергию. Это режим работы двигателя как синх-ронного компенсатора.
Механические характеристики СД.
Обычно СД применяются на мощность в несколько тысяч кВт, при этом почти всегда существует компенсация реактивной мощности – это пре-имущество; недостатки – это относительная дороговизна, выпадение из синхронизма при резком увеличении момента сопротивления.
Регулирование скорости СД осуществляют либо изменением частоты пита-ния либо изменением числа пар полюсов одновременно на роторе и статоре.
Регулирование частотой делают с помощью тиристорных преобразователей. Любые другие приемы приводят к выпадению из синхронизма.
Пуск СД:

Для характеристики 2 сопротивление ротора велико и добиться синхронной работы двигателя при данном графике для простыми способами невоз-можно. Что касается кривой 1 сопротивление ротора незначительно, для пус-ка подают напряжение на статор при отключенном напряжении возбуждения, двигатель запускается как асинхронный когда достигает подсинхронной скорости 95-98% от подают напряжение возбуждения и двигатель втяги-вается в синхронизм. При этом становится равным и  - на-ступает статический режим работы.
- на-ступает статический режим работы.
Легкий пуск СД осуществляется путем первоначального подключения напря-жения питания к статору через реактор а затем по мере разгона и уменьше-ния потребляемого тока закорачивается реактор и подается полное напряже-ние на статорную обмотку.

 ;
;  ;
; 
1 – характеристика от пусковой обмотки.
2 – от составляющей поля ротора вращающегося с частотой .
3 – для поля  причем если
причем если  то имеем двигательный режим от влияния этого поля , если
то имеем двигательный режим от влияния этого поля , если  его влияние как при работе двигателя в генераторном режиме.
его влияние как при работе двигателя в генераторном режиме.
В итоге получается кривая 0.
Торможение СД.
Осуществляется способами:
1). Динамическое торможение – отключение статора от сети и включение на резисторы гашения.
2). Противоток – переключение 2-х фаз статора.
Динамика обобщенной электромеханической системы.
Ранее рассматривались варианты механических систем и электромеха-нических систем и их динамику по отдельности друг от друга – рассмотрим это в совокупности.
Обобщенная механическая система с позиции теории управления характеризуется передаточной функцией, частотной передаточной функцией по управляющему и возмущающему воздействию, и эти характеристики должны быть учтены при разработке замкнутых САР электропривода.
Ранее было установлено что механическая часть электропривода пред-ставляет собой слабодемпфированое колебательное звено обладающее неко-торой упругостью. Динамика элекромеханического преобразователя харак-теризуется с позиции управления инерционным звеном с некоторой постоян-ной времени. Ранее электропривод рассматривали практически в статике, не учитывая переходные процессы. Сейчас чтобы получить качесвенное регули-рование, работать на мощностях близких к предельным надо учитывать дина-мические параметры этой системы.
Математическое описание и структурная
схема электромеханической системы с использованием ДПТ
независимого возбуждения.





M 


Для механической системы:




Для электромеханической системы:
 - характеризует динамику процессов в ОВ.
- характеризует динамику процессов в ОВ.

 -уравнение электрического равновесия в якор-ной обмотке.
-уравнение электрического равновесия в якор-ной обмотке. 
Составим структурную схему работы электромеханической системы:

По такому же алгоритму строится структурная схема с применением ДПТ последовательного возбуждения, асинхронного двигателя, синхронного дви-гателя с учетом динамики механической нагрузки.
Если использовать линеализацию нелинейных участков механической характеристики то можно рассматривать динамику электромеханических систем практически для всех видов двигателей. Особенности применения различных двигателей для расчета элекромеханических систем является учет жесткости механической характеристики , приравнивание  , где - электромагнитная постоянная времени машины переменного тока, а
, где - электромагнитная постоянная времени машины переменного тока, а  - пос-тоянная времени машины постоянного тока.
- пос-тоянная времени машины постоянного тока.
Тогда обобщенная структурная схема будет выглядеть так:

 - постоянная времени машины переменного тока.
- постоянная времени машины переменного тока.
Эта структурная схема является общей для электромеханической смстемы в составе которой используются различные двигатели.
Электромеханические системы включающие в себя два и более видов масс (двигатель, редуктор, приводной механизм) в упрощенных расчетах ис-пользуют в виде одномассовой системы.

 ;
;

Структурная имеет вид:

Упрощенный вариант схемы применяемый для любых двигателей поскольку используется линейная часть механической характеристики. Эта схема хоро-шо работает при использовании ДПТ независимого возбуждения, точность такой схемы повышается для двигателей последовательного возбуждения при переходе на нелинейный участок кривой намагничивания дает доста-точно высокую точность для АД при условии что S<0,75Sкр.
Если рассматривать электромеханическую систему как объект управле-ния, то передаточная функция будет определяться так:
 - передаточная функция по управлению.
- передаточная функция по управлению.

Характеристическое уравнение осуществляется путем приравнивания к нулю 
 ;
; 
 - электромеханическая постоянная системы.
- электромеханическая постоянная системы.
- электромеханическая постоянная двигателя.
Пусть m>4:  ;
; 
 ;
;  ;
; 
Логарифмическая амплитудно-частотная хпрактеристика:

Пусть m=4:  ;
;  ;
; 

Пусть m<4:  ;
;  ;
;  ;
;
 ;
;  ;
;  - коэффициент демпфирования.
- коэффициент демпфирования.

Для m>4:  - реакция электромеханической системы на ударные воздей-ствия со стороны управления.
- реакция электромеханической системы на ударные воздей-ствия со стороны управления.

h(t) – реакция при скачкообразном воздействии.

Параметры и  определяются соотношением
определяются соотношением  к .
к .
- коэффициент затухания.
Быстродействие системы определяется электромагнитной постоянной ; обычно изменяется от 0,01 до 0,1 с.
, где - жесткость механической характеристики.
 - суммарный момент инерции.
- суммарный момент инерции.
 ;
;  - электромеханическая постоянная двигателя. При мощности двигателя более 10кВт
- электромеханическая постоянная двигателя. При мощности двигателя более 10кВт  изменяется от 0,05 до 0,5 с. Для двигателей небольшой мощности
изменяется от 0,05 до 0,5 с. Для двигателей небольшой мощности  . Для таких пределов m
. Для таких пределов m  . В этом случае считают что коэффииент демпфирования достаточно высок и в определенных случаях нет смысла учитывать колебательность ситемы. Если m>4 и двигатель небольшой мощности то
. В этом случае считают что коэффииент демпфирования достаточно высок и в определенных случаях нет смысла учитывать колебательность ситемы. Если m>4 и двигатель небольшой мощности то  .
.


Тогда структурная схема упрощается:

Устойчивое положение электромеханической системы.

Установившийся режим характеризуется равенством вращательного момента и суммы моментов сопротивления.
1 и 2 – механические характеристики АД при различном включении питаю-щего напряжения.
3 – в режиме двигателя представляет собой статическую нагрузку в виде подъемной лебедки с активной нагрузкой с учетом реактивных моментов двигательного режима. График 3 в 4-м квадранте т.е. в режиме реккупи-ративного торможения характеризует движение груза этой лебедки с учетом реактивных составляющих момента.
4 – момент сопротивления вентилятора.
Допустим нагрузка 3 увеличилась и заняла положение  , имеем две точки равновесия a и b. Если только двигатель находится на участке характерис-тики со скольжением (т.а) то такой наброс нагрузки не вызовет оста-новку двигателя. Если же двигатель при таком набросе нагрузки находится на участке механической характеристики где
, имеем две точки равновесия a и b. Если только двигатель находится на участке характерис-тики со скольжением (т.а) то такой наброс нагрузки не вызовет оста-новку двигателя. Если же двигатель при таком набросе нагрузки находится на участке механической характеристики где  например в т.b то это по-ложение равновесия является неустойчивым.
например в т.b то это по-ложение равновесия является неустойчивым.
Для вентиляторной нагрузки т.b – точка устойчивого равновесия, т.к. нап-ример при увеличении  приращение момента сопротивления вентилятора гораздо выше чем приращения вращательного момента.
приращение момента сопротивления вентилятора гораздо выше чем приращения вращательного момента.
Для двигателя  ; для привода
; для привода  .
.
Для того чтобы режим был устойчивым должно быть:  .
.
Ввиду того что механическая часть привода как объекта управления пред-ставляет собой консервативное колебательное звено эти колебания передают-ся на двигатель и благодаря внутренней обратной связи по скорости системы эти колебания приводят к изменению момента что приводит к демфирова-нию колебаний механической части.
Переходные процессы в электроприводе.
В электромеханической системе существуют переходные процессы механи-ческие, электромагнитные и тепловые. Они осуществляются в связи с изме-нением механических и электрических переменных(момент сопротивления; сила; напряжение; ток; частота). Результатом этих процессов является изме-нение момента и КПД. Совокупность электрических и механических пере-ходных процессов создает переходные процессы электромеханической сис-темы. Имеется большое разнообразие возможных траэкторий переходных процессов, но обычно выбирают чтобы при изменении от начального зна-чения до конечного такой процесс который бы обеспечил при  мини-мальное время переходного. Это задача оптимизации процесса по быстродей-ствию – изучается в системах управления электроприводами.
мини-мальное время переходного. Это задача оптимизации процесса по быстродей-ствию – изучается в системах управления электроприводами.
Схема оптимизации по быстродействию.

Поскольку реактивный момент сопротивления всегда направлен в сторону вращения двигателя и препятствует этому вращению, например вентиля-торный момент, ускорение будет неодинаковое при переключении враща-тельного момента двигателя. На рис.  - времени пуска двигателя в обратную сторону. Очень часто условия эксплуатации требуют постоянство ускорения, например в лифтах, исходя из комфортности для людей. Созда-ются специальные схемы обеспечивающие постоянство этого параметра при разных видах нагрузки. Кроме того часто требуется повышенная плавность пуска двигателя исходя из условий надежности работы привода.
- времени пуска двигателя в обратную сторону. Очень часто условия эксплуатации требуют постоянство ускорения, например в лифтах, исходя из комфортности для людей. Созда-ются специальные схемы обеспечивающие постоянство этого параметра при разных видах нагрузки. Кроме того часто требуется повышенная плавность пуска двигателя исходя из условий надежности работы привода.
Нужно чтобы:  Для ДПТ такой фактор используется часто, т.к. надо обеспечить чтобы
Для ДПТ такой фактор используется часто, т.к. надо обеспечить чтобы  . Такое условие ставится исходя из требований надежности работы коллекторно-щеточного механизма.
. Такое условие ставится исходя из требований надежности работы коллекторно-щеточного механизма.

Это условие сохраняется и для минимума т.н. рывка  .
.
Введение ограничения по  приводит к увеличению времени пуска, т.е. времени переходного процесса и снижается быстродействие запуска привода.
приводит к увеличению времени пуска, т.е. времени переходного процесса и снижается быстродействие запуска привода.
Реальные электромеханические системы являются нелинейными объектами управления и имеют 2 вида нелинейностей:
- нелинейность от гистерезиса, зазоров, нелинейность обратной связи;
- произведение переменных величин в уравнениях работы объекта.
Для расчетов переходных процессов в приводе обычно используют (т.к. это нелинейная система) разные методы: фазовой плоскости; припасовывания; гармонической линеализации.
Ударный режим работы привода.
Т.к. привод обычно является колебательным слабодемпфированным звеном при скачкообразном набросе момента сопротивления (нагрузки) в системе протекает переходный процесс затухающий.

При набросе нагрузки скачком начинает уменьшаться частота вращения дви-гателя что приводит к возрастанию тока потребляемого из сети, возрастанию вращательного момента до нового положения равновесия, но т.к. электромеханическая система является колебательным звеном переход к но-вому состоянию равновесия осуществляется по кривой механической харак-теристики. Ввиду того что в двигателях существует электромагнитная инер-ция, определяемая параметром изменение момента затягивается по срав-нению с изменением скорости вращения двигателя.
 ;
; 
Если наброс нагрузки осуществляется с включением добавочного сопротив-ления в цепь якоря то можно не учитывать и колебательность переходно-го процесса отсутствует и изменение скорости вращения протекает по стати-ческой характеристике.
В этом случае составляющая  и объект становятся апериодическим звеном первого порядка.
и объект становятся апериодическим звеном первого порядка.