В пространстве
Автоматизация процесса ориентации проходческих комбайнов в пространстве является одной из сложнейших и важных задач.
Каждая горная выработка шахты должна иметь строго установленное направление. От точности выдерживания направления зависят точность вскрытия пластов полезного ископаемого, сток воды по выработкам, работа внутришахтного транспорта и т.д. Точность направления выработок традиционно контролируется маркшейдерским надзором путем периодических замеров, выполняемых вручную. Такой контроль не исключает ошибок при проходке и связан с затратами средств на исправление выработок. Если проводятся выработки буровзрывным способом или гидравлическим, иного способа контроля направления выработки применить невозможно. При проведении выработок с помощью проходческих комбайнов, обеспечивающих высокие скорости проходки, маркшейдерский контроль, требующий относительно много времени и остановки комбайна на время проведения замеров, существенно сдерживает его производительность. Необходимо переходить от периодического контроля к непрерывному, что требует использования средств автоматизации.
При этом следует заметить, что автоматизация направления движения для горнопроходческих комбайнов целесообразна в том случае, когда механизм комбайна может поддерживать заданное направление и отрабатывать с помощью системы автоматизации возникающие отклонения от заданного направления движения. Управление должно стабилизировать направление движения комбайна в вертикальной и горизонтальной плоскостях и крен (поворот вокруг продольной горизонтальной оси), и в случае отклонения комбайна от заданного направления воздействовать на элементы комбайна так, чтобы отклонение не превышало допустимых пределов. Изменение направления движения в вертикальной плоскости производится перемещением исполнительного органа вверх или вниз, в горизонтальной—гусеничным ходом и распорными домкратами, ликвидация крена—исполнительным органом и домкратами. Следовательно, механизм комбайна должен обладать устойчивостью и управляемостью в горизонтальной и вертикальной областях перемещения комбайна (под “управляемостью” машины следует понимать способности механизма комбайна обеспечивать принудительное движение всех звеньев его кинематической цепи под влиянием управляющих воздействий независимо от возмущающего воздействия внешних сил; под “устойчивостью” следует понимать равновесие механизма комбайна под действием всех внешних сил).
Автоматизация управления направлением движения проходческого комбайна усложняется тем, что он, объект автоматизации, при движении в пространстве не обладает самовыравниванием. Как любое свободное твердое тело, комбайн имеет шесть степеней подвижности: прямолинейные движения по трем перпендикулярным направлениям и вращение вокруг трех перпендикулярных осей. В горной выработке под действием внутренних и внешних сил комбайн может неограниченно двигаться в направлении равнодействующей и этих сил.
Выполнение указанных функций может обеспечить замкнутая система автоматического управления, которая должна включать: устройство, контролирующее направление движения комбайна и формирующее сигнал, пропорциональный отклонению действительного направления движения от заданного; устройство, вырабатывающее команды на органы управления комбайном с целью уменьшения отклонения контролирующих параметров от заданных величин.
Для осуществления направленного движения проходческих комбайнов необходимо измерять координаты образующей точки в заданной системе отсчета, связанной с выработкой. Способы нахождения координат определяют в основном принципы осуществления систем направленного движения комбайнов. Можно отметить следующие способы: оптические (световые, инфракрасные лучи, луч лазера); гравитационные (маятники, уровни); геодезические (автоматы-нивелиры, планограммы); механические (струна, трос); гироскопические (гировертикаль, гирокомпас); магнитные (компас с магнитомодуляционным датчиком, с датчиком Холла).
Непосредственное измерение координаты возможно при механическом и оптическом способах, так как они обеспечивают прямую связь комбайна с неподвижной системой координат отсчета.
Остальные способы требуют дополнительных расчетов (специальных вычислительных устройств), позволяющих преобразовать измеряемую величину в координату точки, связанной с комбайном. Эти способы являются косвенными способами и в большинстве случаев требуют однократного или двукратного интегрирования некоторой функции измеряемой величины в функции пройденного пути. Косвенные способы, несмотря на относительную сложность определения координаты главной образующей точки, являются перспективными, так как обеспечивают автономное (связанное только с комбайном) движение по траектории любой формы, что необходимо для решения задач безлюдной выемки угля.
Для осуществления направленного движения проходческих комбайнов необходимо измерять координаты образующей точки в заданной системе отсчета, связанной с выработкой. Способы нахождения координат в определяют в основном принципы осуществления систем направленного движения комбайнов. Можно отметить следующие способы: оптические (световые, инфракрасные лучи, луч лазера); гравитационные (маятники, уровни); геодезические (автоматы-нивелиры, планограммы); механические (струна, трос); гироскопические (гировертикаль, гирокомпас); магнитные (компас с магнитомодуляционным датчиком, с датчиком Холла). Непосредственное измерение координаты возможно при оптическом и механическом способе, так как они обеспечивают прямую связь комбайна с неподвижной системой координат отсчета. Остальные способы требуют дополнительных расчетов (специальных вычислительных устройств), позволяющих преобразовать измеряемую величину в координату точки, связанной с комбайном. Эти способы являются косвенными способами и в большинстве случаев требуют однократного или двукратного интегрирования некоторой функции измеряемой величины в функции пройденного пути. Косвенные способы, несмотря на относительную сложность определения координаты главной образующей точки, являются перспективными, так как обеспечивают автономное (связанное только с комбайном) движение по траектории любой формы, что необходимо для решения задач безлюдной выемки угля.
Остановимся на основных способах автоматического контроля.
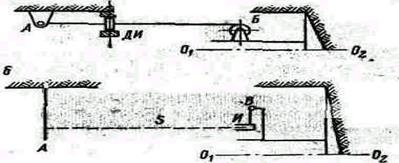
1. Способ автоматической привязки к неподвижной системе отсчета с помощью струны, основанный на фиксации двух точек отрезка прямой, параллельной оси комбайна. Гибкая нить закрепляется в неподвижной точке А выработки, проходит через индуктивный датчик ДИ и фиксируется на барабанчике в точке Б, установленном на комбайне. По мере перемещения комбайна нить сматывается с барабанчика Б. (натяжение нити с увеличением ее длины должно увеличиваться так, чтобы исключить влияние веса нити на отсчеты) При отклонении комбайна от заданной линии якорь ДИ, жестко соединенный с гибкой нитью, будет перемещаться относительно неподвижного ярма, и на выходе ДИ появиться напряжение, соответствующее по знаку - направлению отклонения, а по амплитуде — величине отклонения. Зная длину базы (расстояние от А до ДИ) и длину нити (от А до Б), можно определить положение точки Б. Способ дает привязку одной точки комбайна и наиболее пригоден для измерения отклонений в горизонтальной плоскости. Недостатком способа является: - необходимость переноса закрепленного конца струны и датчика с участием маркшейдера; -непригодность для искривленных участков выработки: - отсутствие привязки второй точки комбайна, что не позволяет судить о фактическом положении его оси в пространстве.
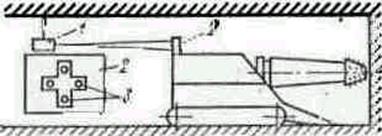
2. При проведении прямолинейных выработок наиболее перспективным является контроль направления движения проходческого комбайна с помощью лазерного луча.
Лазерный излучатель 1 на расстоянии до 1000м (содержание пыли в атмосфере должно быть меньше 50 мг/м3 при относительной влажности 98—100%) неподвижно закрепляется в горной выработке позади комбайна в точке, координаты которой известны, а направление луча выставляется по заданному направлению выработки. На комбайне устанавливается приемник лазерного излучения 2 с фотосопротивлением З. Если комбайн движется по заданному направлению, лазерный луч находится в центре приемника и не засвечивает фотосопротивления, а если комбайн отклоняется от заданного направления, луч лазера засвечивает одно из фотосопротивлений и в зависимости от того, какое именно, формируется команда на органы управления комбайном, которые должны возвратить его к заданному направлению.
|
.
При контроль направления движения проходческого комбайна с помощью лазерного луча.разработана лазерная система телеуправления горными машинами ЛАСТУГМ-1, которая предназначена для дистанционного управления горнопроходческими комбайнами, механизированными щитами, погрузочными машинами и бурильными установками. В системе использован гелий-неоновый лазерный излучатель ЛГ-56 мощностью 2 мВт. Фотоприемник выполнен на фотоэлектронном умножителе ФЭУ-51 и установлен на поворотном устройстве, которое обеспечивает поиск луча и непрерывное слежение за ним в ходе работы. Дальность действия ЛАСТУГМ-1 составляет 300 м при средней запыленойстве, которое обеспечивает поиск луча и непрерывное слежение за ним в ходе работы. Дальность действия ЛАСТУГМ-1 составляет 300 м при средней запыленности атмосферы до 50 мг/м3 и влажности до 94%
На рисунке [ ] приведена блок-схема системы ЛАСТУГМ- 1, которая работает следующим образом. От источника лазерного излучения G через модулятор UB модулированный поток, пройдя по выработке, поступает на приемную матрицу (экран) с фотодатчиками BL, которая установлена на комбайне.
В системе используется модулированный поток для того, чтобы фотодатчики ВL1—BL4 не реагировали на другие немодулированные потоки (свет лампочки, фара). На экране луч лазера образует четкое видимое световое пятно, которое на рисунке выделено штриховкой.Когда комбайн движется точно по заданному направлению, это пятно не накрывает фотодатчики. Если комбайн отклонится от заданного направления, световое пятно накроет один из фотодатчиков. Например, если комбайн отклонится вправо от горизонтальной оси, то световое пятно накроет фотодатчик BL1. При этом, через усилитель Л1 сигнал фотодатчика BL1 поступит на блок управления приводами БУП, который выдаст команду на тот привод М который начнет возвращать комбайн в первоначальное заданное положение.
Для повышения устойчивости системы автоматической ориентации в нее введена обратная связь по положению приводов, выполненная датчиками положения В, и блоком обратной связи БОС. В процессе управления БОС обеспечивает перемещение экрана в противоположную сторону от смещения комбайна (отрицательная обратная связь) и таким образом реализует пропорциональный закон регулирования.