Принцип действия.
На обмотку статора подаётся переменное напряжение, под действием которого по этим обмоткам протекает ток и создаёт вращающееся магнитное поле. Магнитное поле воздействует на обмотку ротора и по закону электромагнитной индукции наводит в ней ЭДС. В обмотке ротора под действием наводимой ЭДС возникает ток. Ток в обмотке ротора создаёт собственное магнитное поле, которое вступает во взаимодействие с вращающимся магнитным полем статора. В результате на каждый зубец магнитопровода ротора действует сила, которая, складываясь по окружности, создаёт вращающий электромагнитный момент, заставляющий ротор вращаться.Чтобы в обмотке ротора возникала ЭДС необходимо чтобы скорость вращения ротора отличалась от скорости вращения поля статора. Поэтому ротор вращается асинхронно относительно статора, а двигатель называется - асинхронным. Относительное отставание скорости вращения ротора от поля статора называется скольжением. Номинальное скольжение обычно составляет 2-8%.
| ПСТ.КР140448ЭЛ41-09с20.000ПЗ |
| Изм |
| Документ |
| Лист |
| Подпись |
| Дата |
| Лист |









 Рассмотрим устройство, показанное на рис. Оно состоит из постоянного магнита 1, медного диска 2, рукоятки 3 и подшипников 4. Если вращать магнит при помощи рукоятки, то медный диск начинает вращаться в ту же сторону, но с меньшей частотой. Медный диск можно рассматривать как бесчисленное множество замкнутых витков; при вращении магнита 1 его магнитные силовые линии (м.с.л.) пересекают витки диска, и в витках наводится электродвижущая сила.
Рассмотрим устройство, показанное на рис. Оно состоит из постоянного магнита 1, медного диска 2, рукоятки 3 и подшипников 4. Если вращать магнит при помощи рукоятки, то медный диск начинает вращаться в ту же сторону, но с меньшей частотой. Медный диск можно рассматривать как бесчисленное множество замкнутых витков; при вращении магнита 1 его магнитные силовые линии (м.с.л.) пересекают витки диска, и в витках наводится электродвижущая сила.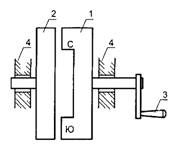
Модель асинхронного двигателя
Обозначим:
п, — частота вращения магнита (синхронная частота), об/мин;
п2 — частота вращения диска, об/мин; п — разность частот вращения магнита и диска, об/мин.
Частота вращения диска меньше частоты вращения магнита, и, следовательно, диск вращается с несинхронной (асинхронной) частотой. Разница частот магнита и диска представляет собой частоту, с которой м.с.л. пересекают витки диска. Отношение разницы частот к синхронной частоте называется скольжением. Скольжение может быть выражено в долях единицы или в процентах:
В двигателях вращающееся магнитное поле создается трехфазным током, протекающим по обмотке статора, а роль диска выполняет обмотка ротора. Активная сталь статора и ротора служит магнитопроводом, уменьшающим в сотни раз сопротивление магнитному потоку.Под влиянием подведенного к статору напряжения сети Ul в его обмотке протекает ток I,. Этот ток создает вращающийся магнитный поток Ф, замыкающийся через статор и ротор. Поток создает в обеих обмотках э.д.с. Е{ и Е2, как в первичной и вторичной обмотках трансформатора. Таким образом, асинхронный двигатель подобен трехфазному трансформатору, в котором э.д.с. создаются вращающимся магнитным потоком.
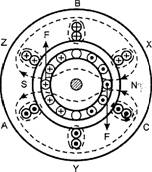
Рис. 2 . Работа асинхронного двигателя при cos ф2 = 1
Пусть поток вращается в направлении движения стрелки часов. Под влиянием э.д.с. Е2 в обмотке ротора пойдет ток I2, направление которого показано на рис. 2. Предположим, что он совпадает по фазе с Е2. Взаимодействие тока I2 и потока Ф создает электромагнитные силы F, приводящие ротор во вращение, вслед за вращающимся потоком. Таким образов, асинхронный двигатель представляет собой трансформатор с вращающейся вторичной обмоткой и способный поэтому превращать электрическую мощность E2I2 cos ф в механическую.
Ротор всегда отстает от вращающегося магнитного потока, так как только в этом случае может возникать э.д.с. Е2, а следовательно, ток 12 и силы F. Чтобы изменить направление вращения ротора, следует изменить направление вращения потока. Для этого меняют местами два любых провода, подводящие ток от сети к статору. В этом случае меняется порядок следования фаз ABC на АСВ или ВАС, и поток вращается в обратную сторону.
Ротор двигателя вращается с асинхронной частотой п2, поэтому и двигатель называется асинхронным. Частоту вращения магнитного потока называют синхронной частотой п1.
| ПСТ.КР140448ЭЛ41-09с20.000ПЗ |
| Изм |
| Документ |
| Лист |
| Подпись |
| Дата |
| Лист |









 Частота вращения ротора
Частота вращения ротора 
Теоретически скольжение меняется от 1 до 0 или от 100% до 0, так как при неподвижном роторе в первый момент пуска п2 - 0; а если вообразить, что ротор вращается синхронно с потоком, п2 = пх.
Чем больше нагрузка на валу, тем меньше скорость ротора п2 и следовательно больше S, так как больший тормозной момент должен уравновеситься вращающим моментом; последнее возможно только при увеличении Е2 и I2, а значит и S. Скольжение при номинальной нагрузке SH у асинхронных двигателей равно от 1 до 7%; меньшая цифра относится к мощным двигателям.
ПСТ.КР140448ЭЛ41-09с20.000ПЗ
Изм
Документ
Лист
Подпись
Дата
Лист









 Способы управления асинхронным двигателем.
Способы управления асинхронным двигателем.
Под управлением асинхронным двигателем переменного тока понимается изменение частоты вращения ротора и/или его момента.
Существуют следующие способы управления асинхронным двигателем:
· реостатный — изменение частоты вращения асинхронного двигателя с фазным ротором путём изменения сопротивления реостата в цепи ротора, кроме того это увеличивает пусковой момент и повышает критическое скольжение;
· частотный — изменение частоты вращения асинхронного двигателя путём изменения частоты тока в питающей сети, что влечёт за собой изменение частоты вращения поля статора. Применяется включение двигателя через частотный преобразователь;
· переключением обмоток со схемы «звезда» на схему «треугольник» в процессе пуска двигателя, что даёт снижение пусковых токов в обмотках примерно в три раза, но в то же время снижается и момент;
· импульсный — подачей напряжения питания специального вида (например, пилообразного);
· введение добавочной ЭДС согласно или противонаправлено с частотой скольжения во вторичную цепь;
· изменением числа пар полюсов, если такое переключение предусмотрено конструктивно (только для короткозамкнутых роторов);
· изменением амплитуды питающего напряжения, когда изменяется только амплитуда (или действующее значение) управляющего напряжения. Тогда вектора напряжений управления и возбуждения остаются перпендикулярны (автотрансформаторный пуск);
· фазовое управление характерно тем, что изменение частоты вращения ротора достигается путём изменения сдвига фаз между векторами напряжений возбуждения и управления;
· амплитудно-фазовый способ включает в себя два описаных способа;
· включение в цепь питания статора реакторов;
· индуктивное сопротивление для двигателя с фазным ротором.
| ПСТ.КР140448ЭЛ41-09с20.000ПЗ |
| Изм |
| Документ |
| Лист |
| Подпись |
| Дата |
| Лист |


 Задача.
Задача.
Дано:U=660В, P1=19,3кВт, φ=0,87, nмех=435, Рм=263Вт, Рмех=141Вт, r 1.20=0,8 Ом
Найти: КПДном-? U1-? I1ном--? Рэ1--? Рэ2--? Рэм--? Рдоб--? Робщее--?.
Решение:
1)I1= (P1*103)/(m1 U1cos φ) =(19,3*103)(3*380*0,87)=19,5А
2)U=660/J3=380
3)r=, r 1.20(17n(tраб-20)=0,8(1+0,004(110-20)=1,1 Ом
4) Рэ1= m1 I2номr2=3*19,52*1,1=1255Вт
5) Рэм=Р1-( Рм+ Рэ1)=19,3*103-(263+1255)=17782Вт
6)Sном=(n1-n1ном)/n=(1500-435)/1500=0,71
7) Рэ2= Sном Рэм=0,71*17782=1265Вт
8) Рдоб=0,005* Рэм=0,005*19,3*103=97Вт
9) Робщее=263+1255+12625+141+97=14381
10) КПДном=1- Робщее/ P1=1-14381/(19,3*103)=0,255
| ПСТ.КР140448ЭЛ41-09с20.000ПЗ |
| Изм |
| Документ |
| Лист |
| Подпись |
| Дата |
| Лист |








 Список использованной литературы:
Список использованной литературы:
1. https://ru.wikipedia.org
2. http://model.exponenta.ru
3. http://www.a-a-a.ru
4. http://electricalschool.info/maschiny