Резистивные датчики перемещения
Резистивный датчик перемещения представляет собой переменное, как правило, проволочное сопротивление, движок которого кинематически связан с источником входного сигнала [12] – углового или линейного перемещения.
По конструктивному исполнению каркаса различают плоские и цилиндрические резистивные преобразователи с прямолинейным перемещением подвижного контакта, а также с угловым перемещением движка (кольцевые и спиральные).
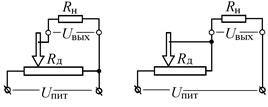
Резистивные датчики перемещения (рис. 2.9) в зависимости от схемы включения преобразователя Rд и нагрузки измерительной цепи Rн подразделяются на потенциометрическиеи реостатные преобразователи. Потенциометрический датчик включается по схеме делителя напряжения (рис. 2.9, а). Реостатный преобразователь включается последовательно с нагрузкой измерительной цепи (рис. 2.9, б).
а б
Рис. 2.9. Потенциометрическое (а) и реостатное (б)
включения резистивного датчика перемещения
Потенциометрическое включение резистивного преобразователя является наиболее предпочтительным при соотношении Rн >> Rд, реостатное включение требует соразмерности Rн и Rд, а также постоянства значения Rн.
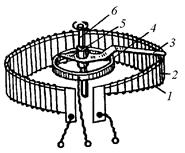
На рис. 2.10 показано устройство резистивного преобразователя углового перемещения. На каркас 1 из изоляционного материала намотана с равномерным шагом проволока 2.Изоляция проволоки на верхней грани каркаса зачищается, и по металлу проволоки скользит щетка 3.Добавочная щетка 5 скользит по токосъемному кольцу 4.Обе щетки изолированы от приводного валика 6.
Каркас выполняют из диэлектрического материала (текстолита, эбонита и др.) или металла (оксидированного алюминия). Для обмотки используют тонкий провод из константана, манганина, нихрома, а также сплавы из благородных металлов на основе платины, серебра и др. Провод датчика может быть покрыт либо эмалью, либо слоем окислов, изолирующих соседние витки друг от друга. Диаметр провода выбирают в пределах 0,03 – 0,1 мм для прецизионных датчиков и 0,3 – 0,4 мм – для датчиков низкого класса точности. Подвижный контакт (движок, щетка) выполняется либо из двух-трех проволок, изготовленных из сплава платины с иридием или из платины с бериллием, либо в виде пластинчатых щеток из серебра или фосфористой бронзы.
Рассмотрим работу датчика в режиме холостого хода, когда сопротивление нагрузки  . На практике режим, близкий к холостому ходу, имеет место, например, при подаче выходного напряжения датчика на усилитель с очень высоким входным сопротивлением (например на операционный усилитель). Выходное напряжение датчика в режиме холостого хода
. На практике режим, близкий к холостому ходу, имеет место, например, при подаче выходного напряжения датчика на усилитель с очень высоким входным сопротивлением (например на операционный усилитель). Выходное напряжение датчика в режиме холостого хода
 ,
,
где Rд – полное сопротивление датчика, a Rx – сопротивление введенной части потенциометра.
Если lх – длина обмотки потенциометра, то при постоянном сопротивлении проволоки на единицу длины и равномерной намотке
 .
.
Следовательно, в режиме холостого хода выходное напряжение датчика связано с входным перемещением lх линейной зависимостью
Uвых = klx, 0 £ lх £ lд, (2.16)
где коэффициент передачи
 . (2.17)
. (2.17)
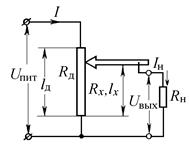
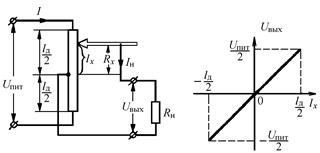
Рассмотренный датчик позволяет измерять перемещения только одного знака и является однотактным. Для построения датчика, реагирующего на знак входного перемещения, необходимо иметь сопротивление с отводом от некоторой промежуточной (обычно средней) точки обмотки. Схема такого датчика приведена на рис. 2.11. Если перемещение движка отсчитывать от средней точки обмотки, то статическая характеристика датчика при сделанных выше допущениях по-прежнему будет определяться выражением (2.16), только пределы изменения lx будут другими:
 . (2.18)
. (2.18)
| 
|
| Рис. 2.10. Конструкция резистивного преобразователя перемещения | Рис. 2.11. Расчетная схема однотактного потенциометрического датчика |
При изменении знака входного перемещения выходное напряжение датчика изменяет свой знак на противоположный, поэтому датчик, выполненный по схеме, изображенной на рис. 2.12, а, является двухтактным. Коэффициент передачи датчика определяется выражением (2.17).
а б
Рис. 2.12. Простейший двухтактный потенциометрический датчик:
а – схема включения; б – статическая характеристика в режиме холостого хода
Соотношения (2.16) и (2.17) сохраняют силу и в том случае, когда питание датчика осуществляется от источника переменного тока, если под Uпит и Uвых понимать действующие значения напряжений.
Одним из основных требований, предъявляемых к потенциометрическим датчикам, является линейность статической характеристики Uвых = U(lx). Статическая характеристика реальных датчиков является нелинейной, и выражение (2.16) описывает ее лишь приближенно. Основными причинами, нарушающими линейность статической характеристики потенциометрических датчиков, являются: влияние нагрузки, ошибка ступенчатости (витковая ошибка, погрешность квантования) и инструментальные погрешности.
Влияние нагрузки – одна из основных причин, вызывающих отклонение («провисание») статической характеристики датчика от линейной зависимости (рис. 2.13). Аналитическое выражение статической характеристикипри подключении нагрузки Rнимеет следующий вид:
 (2.19)
(2.19)
Но и в режиме холостого хода статическая характеристика реальных датчиков не является линейной вследствие наличия ошибки ступенчатости и инструментальных погрешностей. Ошибка ступенчатости обусловлена тем, что при перемещении подвижного контакта он последовательно переходит с одного витка обмотки на другой. Так как сопротивление витка  (w – число витков обмотки датчика) имеет конечную величину, то в результате выходное напряжение датчика при перемещении движка изменяется по ступенчатой кривой, показанной на рис. 2.14. При переходе подвижного контакта с витка на виток выходное напряжение датчика изменяется скачком на величину падения напряжения на одном витке
(w – число витков обмотки датчика) имеет конечную величину, то в результате выходное напряжение датчика при перемещении движка изменяется по ступенчатой кривой, показанной на рис. 2.14. При переходе подвижного контакта с витка на виток выходное напряжение датчика изменяется скачком на величину падения напряжения на одном витке  . Максимальное отклонение напряжения датчика от линейной зависимости вследствие наличия ступенчатости
. Максимальное отклонение напряжения датчика от линейной зависимости вследствие наличия ступенчатости
 .
.
Поскольку индуктивное и емкостное сопротивления резистивных преобразователей перемещения весьма малы, и их можно не принимать во внимание до частот питающего напряжения переменного тока порядка нескольких десятков килогерц. Поэтому при рассмотрении резистивных датчиков в качестве звена автоматической системы необходимо учитывать также сопротивление нагрузки измерительной (усилительной) цепи. При активной нагрузке датчик является безынерционным звеном. При активно-реактивной нагрузке начинает проявляться инерционность устройства.
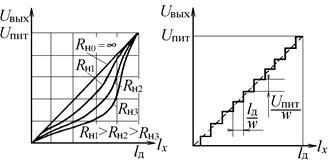
| Рис. 2.13. Эффект «провисания» статической характеристики при уменьшения сопротивления нагрузки | Рис. 2.14. Статическая характеристика потенциометрического датчика с учетом ошибки ступенчатости |
К достоинствам резистивных датчиков перемещения следует отнести малый вес и габариты, сравнительную простоту конструкции и возможность питания от источников как постоянного, так и переменного тока. Основным недостатком таких датчиков является их низкая надежность, обусловленная наличием скользящего контакта, усилия перемещения, а также ограниченная разрешающая способность.
return false">ссылка скрыта