Механика электропривода
1. Общие сведения
Приведение в движение исполнительных механизмов и управление их движением для выполнения технологических операций являются основной задачей автоматизированного электропривода. Поэтому специалист по автоматизированному электроприводу должен знать общие особенности механической части электромеханических систем, важнейшие их элементы, связи и параметры, а также математические методы описания и анализа. Он должен уметь на основе известной кинематики механизма, его технических данных и сведений о технологическом процессе составлять расчетные схемы и рассчитывать параметры механической части электропривода, описывать движение электропривода дифференциальными уравнениями, рассчитывать частотные характеристики и механические переходные процессы на основе методов механики и теории управления.
Перечисленные вопросы представляют содержание данной главы. При изучении этих вопросов важно закрепить и развить имеющиеся представления об основных физических закономерностях механического движения — о связи ускорений масс с приложенными к ним силами, о равномерно ускоренном движении масс, о причинах механического резонанса. Необходимо научиться на основе полученных знаний свободно оценивать характер движения электропривода по известному характеру изменения электромагнитного момента двигателя и приложенных к системе внешних сил либо, напротив, определять законы изменения электромагнитного момента, обеспечивающие формирование требуемых законов движения приводимого механизма.
Перед изучением данных вопросов полезно восстановить в памяти необходимые положения механики и теории управления. В теоретической механике главное внимание следует уделить обобщенному описанию динамики механических систем с помощью уравнений Лагранжа и соответствующим понятиям степеней свободы системы, обобщенных координат, обобщенных сил, их элементарной работы на возможных перемещениях и т. п. В теории управления необходимо рассмотреть частотные характеристики и переходные функции интегрирующего и колебательного звеньев, а также проверить знание простейших приемов преобразования структурных схем и определения передаточных функций.
Реальные кинематические схемы электроприводов конкретных механизмов весьма многообразны, и в данном курсе о них даются основные общие представления, при этом изложение материала ведется на основе обобщенной условной кинематической схемы электропривода. Для того чтобы видеть за условной кинематической схемой особенности реальных схем, необходимо ознакомиться с описательной частью приведенных в данной главе примеров расчета. Они содержат ряд конкретных кинематических схем производственных механизмов различного назначения и помогут лучше понять особенности механической части и усвоить рассматриваемые в курсе типовые нагрузки электроприводов.
Необходимые навыки составления расчетных механических схем электропривода, определения приведенных параметров и нагрузок механической части расчета частотных характеристик и переходных процессов должны быть получены на практических занятиях и в процессе выполнения курсовой работы по первой части курса. При выполнении курсовых заданий следует проработать соответствующие примеры расчета.
2. Расчетные схемы механической части электропривода
Механическая часть электромеханической системы (см. рис. В. 2) включает в себя все связанные движущиеся массы: двигателя, передаточного устройства и исполнительного механизма машины. К ротору двигателя при скорости ω приложен электромагнитный момент М, под действием которого механическая часть приводится в движение и на рабочем органе машины совершается предусмотренная технологией механическая работа. Непосредственное представление о движущихся массах установки и механических связях между ними дает кинематическая схема электропривода.
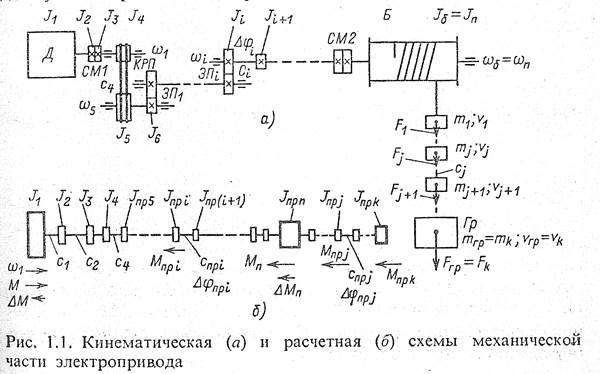
Конкретные кинематические схемы отличаются многообразием, однако обладают и общими свойствами, которые можно установить с помощью кинематической схемы электропривода, представленной на рис. 1.1, а. Здесь двигатель через соединительную муфту СМ1, клиноременную передачу КРП, ряд зубчатых передач ЗП1 .., ЗПi и соединительную муфту СМ2 приводит во вращение барабан Б, преобразующий вращательное движение в поступательное перемещение ряда связанных масс. В данной примерной схеме предполагается, что рабочим органом механизма является грузозахватывающее устройство, перемещающее груз Гр, имеющий массу mгр, движущийся со скоростью υгр и подверженный воздействию силы тяжести Fгр.
Рассмотренная схема и отражает то положение, что в общем случае механическая часть электропривода представляет собой систему связанных масс, движущихся с раз личными скоростями вращательно или поступательно. При нагружении элементы системы (валы, опоры, клиноременные передачи, зубчатые зацепления, канаты и т. п.) деформируются, так как механические связи не являются абсолютно жесткими. При изменениях нагрузки массы имеют возможность взаимного перемещения, которое при данном приращении нагрузки определяется жесткостью связи.
При составлении данной кинематической схемы принято, что механическая часть привода содержит n вращательно движущихся сосредоточенных масс и k поступательно, причем механическая инерция элементов, связывающих эти массы, не учитывается. Каждый вращательно движущийся элемент обладает моментом инерции Ji и связан с (i + 1)-м элементом механической связью, обладающей жесткостью сi. Соответственно каждый поступательно движущийся элемент имеет массу mi и связан со следующим механической связью с жесткостью сj. В пределах деформаций упругих механических связей, для которых выполняется закон Гука, жесткости их можно определить с помощью соотношений
сi = Мyi/ Δ φi, сj= Fyj/ Δ Sj
где Мyi и Fyj — нагрузка упругой механической связи; Δ φi и Δ Sj — деформация упругого элемента при вращательном и поступательном движениях.
Массы элементов и жесткости элементарных связей в кинематической цепи привода различим. Определяющее влияние на движение системы оказывают наибольшие массы и наименьшие жесткости связей. Поэтому одной из первых задач проектирования и исследования электроприводов является составление упрощенных расчетных схем механической части, учитывающих возможность пренебрежения упругостью достаточно жестких механических связей и приближенного учета влияния малых движущихся масс. При этом следует учитывать, что в связи с наличием передач различные элементы системы движутся с разными скоростями, поэтому непосредственно сопоставлять их моменты инерции Ji массы mj жесткости связей сi и сj перемещения Δφi и ΔSj и т. п. невозможно. Как следствие, для составления расчетных схем механической части электропривода необходимо приведение всех параметров элементов кинематической цепи к одной расчетной скорости. Обычно наибольшее удобство представляет приведение их к
скорости двигателя, поэтому оно используется во всем после дующем изложении. Однако следует иметь в виду возможность приведения к скорости любого элемента. В частности, при решении ряда задач оказывается полезным приведение к скорости механизма, особенно при поступательном движения его органа.
 Условием соответствия приведенной расчетной схемы реальной механической системе является выполнение закона сохранения энергии. При приведении необходимо обеспечить сохранение запаса кинетической и потенциальной энергии системы, а также элементарной работы всех действующих в системе сил и моментов на возможных перемещениях. Соответственно при приведении момента инерции элемента системы, движущегося вращательно со скоростью ωi или массы, поступательно движущейся со скоростью υj, к расчетной скорости ω1 должны выполняться условия
Условием соответствия приведенной расчетной схемы реальной механической системе является выполнение закона сохранения энергии. При приведении необходимо обеспечить сохранение запаса кинетической и потенциальной энергии системы, а также элементарной работы всех действующих в системе сил и моментов на возможных перемещениях. Соответственно при приведении момента инерции элемента системы, движущегося вращательно со скоростью ωi или массы, поступательно движущейся со скоростью υj, к расчетной скорости ω1 должны выполняться условия
(1.1)
(1.2)
 Откуда получаем формулы приведения
Откуда получаем формулы приведения
(1.3)
где  - передаточное число от вала приведения до i-го вала;
- передаточное число от вала приведения до i-го вала;  - радиус приведения к валу со скоростью ω1.
- радиус приведения к валу со скоростью ω1.
 При приведении вращательных φi и поступательных Sj перемещений необходимо учитывать, что передаточное число и радиус приведения определяются соотношением скоростей. Исходя из этого, в общем случае перемещения в системе связаны так:
При приведении вращательных φi и поступательных Sj перемещений необходимо учитывать, что передаточное число и радиус приведения определяются соотношением скоростей. Исходя из этого, в общем случае перемещения в системе связаны так:
(1.4)
 При линейных кинематических связях i1i = const и ρ1i = const. В этом случае формулы приведения перемещений имеют вид
При линейных кинематических связях i1i = const и ρ1i = const. В этом случае формулы приведения перемещений имеют вид
(1.5)
При приведении жесткостей механических связей должно выполняться условие равенства запаса потенциальной энергии деформации. Соответственно
 (1.6)
(1.6)
(1.7)
 Откуда получим формулы приведения
Откуда получим формулы приведения
(1.8)
 Приведение моментов и сил нагрузки элементов кинематической цепи должно осуществляться на основании условия равенства элементарной работы на возможных перемещениях:
Приведение моментов и сил нагрузки элементов кинематической цепи должно осуществляться на основании условия равенства элементарной работы на возможных перемещениях:
(1.9)
Следовательно,  (1.10)
(1.10)
При проектировании и исследовании электроприводов моменты инерции, массы, жесткости связей реальных элементов обычно бывают, известны, а действующие в системе силы либо заданы, либо рассчитываются по исходным данным механизма и условиям его технологии. После приведения их значений к расчетной скорости представляется возможным, сопоставив приведенные значения моментов инерции и жесткостей, осуществить выбор главных масс и главных упругих связей и на этой основе составить приближенную расчетную схему механической части. Для большей наглядности сопоставления по результатам приведения можно построить исходную приведенную расчетную схему, представив в ней массы в виде прямоугольников, площадь которых пропорциональна приведенным моментам инерции, а жесткости связей между ними в виде соединений, длина которых обратно пропорциональна жест кости (прямо пропорциональна податливости связей).
Для кинематической схемы на рис. 1.1, а приведенная рас четная схема может иметь вид, показанный на рис. 1.1,б. Для примера в ней выделены три наиболее значительные массы — ротор двигателя с моментом инерции J1 барабан с приведенным моментом инерции Jпрn и груз Jпрk. Рассматривая эту схему, можно видеть, что вследствие малости остальных моментов инерции ее можно существенно упростить. для этого следует малые массы добавить к близлежащим большим, а затем определить эквивалентные жесткости связей между полученными массами по общей формуле:
 (1.11)
(1.11)
На исходной расчетной схеме (рис. 1.1,б) стрелками показаны приложенные к отдельным массам системы приведенные моменты действующих в системе внешних сил Мпрi и Мпрj. К ротору двигателя J1 приложен электромагнитный момент двигателя М и момент механических потерь ΔМ, причем для правильного учета знака действующих моментов указано положительное для всей приведенной схемы направление скорости ω1. .При переходе к упрощенной расчетной схеме необходимо просуммировать все внешние приложенные к массам силы, связи между которыми принимаются жесткими.
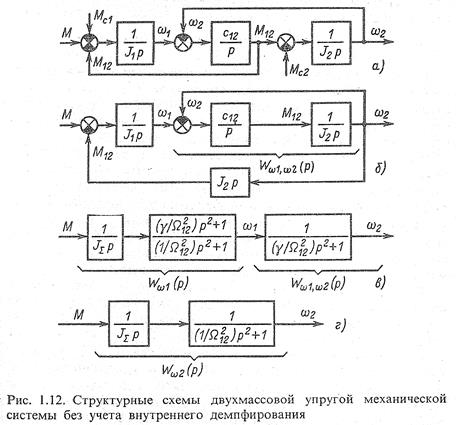
Исследования динамики электроприводов показывают, что неразветвленные расчетные механические схемы в большинстве практических случаев в результате выделения главных масс и жесткостей сводятся к трехмассовой (рис. 1.2, а), двухмассовой (рис. 1.2,б) расчетным схемам и к жесткому приведенному механическому звену (рис. 1.2, в).
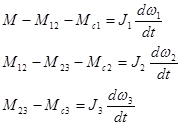
Параметрами обобщенной трехмассовой механической системы (расчетной схемы на рис. 1.2, а) являются суммарные приведенные моменты инерции масс J1, J2 и J3, образованные приведенными массами, связи между которыми приняты жесткими, и эквивалентные приведенные жесткости механических упругих связей между J1 и J2— с12 и между J2 и J3— с23 . Первая масса представляет собой ротор двигателя и жестко с ним связанные элементы; к этой массе приложены электромагнитный момент двигателя М и момент статической нагрузки Мc1 который обычно является суммарным моментом потерь на валу двигателя я в жестко с ним связанных элементах.
 К промежуточной массе механизма (J2) приложен момент сопротивления Мc2, а к третьей (J3) — момент внешней нагрузки этой массы Мc3.
К промежуточной массе механизма (J2) приложен момент сопротивления Мc2, а к третьей (J3) — момент внешней нагрузки этой массы Мc3.
Трехмассовая упругая система при исследовании электромеханических систем автоматизированного электропривода используется в тех случаях, когда возникает необходимость более детального анализа условий движения масс механизма. Для решения задачи при этом обычно используется математическое моделирование на аналоговых или цифровых вычисли тельных машинах. Для исследования отдельных физических особенностей трехмассовая расчетная схема сводится к двухмассовой.
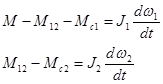
 В обобщенной двухмассовой упругой системе (рис. 1.2, б) суммарный приведенный момент инерции элементов, жестко связанных с двигателем, аналогично предыдущему обозначен J1. Суммарный приведенный момент инерции элементов, жестко связанных с рабочим органом механизма, обозначен J2. Безынерционная упругая связь между этими массами характеризуется приведенной эквивалентной жесткостью c12. Суммарные моменты нагрузок на валу двигателя и механизма обозначены соответственно Мc1 и Мc2.
В обобщенной двухмассовой упругой системе (рис. 1.2, б) суммарный приведенный момент инерции элементов, жестко связанных с двигателем, аналогично предыдущему обозначен J1. Суммарный приведенный момент инерции элементов, жестко связанных с рабочим органом механизма, обозначен J2. Безынерционная упругая связь между этими массами характеризуется приведенной эквивалентной жесткостью c12. Суммарные моменты нагрузок на валу двигателя и механизма обозначены соответственно Мc1 и Мc2.
Электромеханическая система с двухмассовой упругой механической частью представляет собой простейшую модель электропривода, наиболее удобную для изучения влияния упругих механических связей, поэтому в данном курсе является основным объектом изучения.
В тех случаях, когда параметры системы таковы, что влияние упругих связей незначительно, или при решении задач, которых с этим влиянием можно не считаться, механическая часть представляется простейшей расчетной схемой, не учитывающей влияния упругих связей, — жестким приведенным звеном (рис. 1.2, в). В этих случаях многомассовая механическая часть электропривода заменяется одной эквивалентной массой с моментом инерции JΣ , на которую воздействуют электромагнитный момент двигателя М и суммарный при веденный к валу двигателя момент нагрузки Мc. Момент нагрузки Мc включает в себя все внешние силы, приложенные к механической системе, кроме момента двигателя М.
 В случае приведения к валу двигателя (ω1=ωдв) суммарный приведенный момент инерции электропривода JΣ может быть выражен общей формулой
В случае приведения к валу двигателя (ω1=ωдв) суммарный приведенный момент инерции электропривода JΣ может быть выражен общей формулой
(1.12)
где n и k — число масс установки, совершающих соответственно вращательное и поступательное движение.
 Суммарный приведенный к валу двигателя момент стати ческой нагрузки Мc можно в общем, виде записать так:
Суммарный приведенный к валу двигателя момент стати ческой нагрузки Мc можно в общем, виде записать так:
(1.13)
где q, р — число внешних моментов Мi и сил Fj приложенных к системе, кроме электромагнитного момента двигателя.
В заключение отметим, что на практике встречаются разветвленные кинематические схемы, которые приводят к разветвленным расчетным схемам механической части. Характерным примером являются кинематические схемы многодвигательных электроприводов, в которых двигатели через индивидуальные редукторы воздействуют на общий механизм.
3. Типовые статические нагрузки электропривода
Электромагнитный момент двигателя является выходной величиной для электрической части системы (см. рис. В. 2) и входной для механической, поэтому при рассмотрении процессов в системе он выделен из всех действующих на механическую часть внешних моментов. Все остальные силы и моменты определяют статическую нагрузку электропривода Мс. Во всех трех расчетных схемах (рис. 1.2) в соответствии с (1.13) эта нагрузка неизменна, так как для двух массовой системы Мс1 + Мс2 = Мс, а для трехмассовой Мс1 + Мс2 + Мс3 = Мс. Иными словами, при учете упругости суммарная нагрузка неизменна, но уточняется, к каким массам системы приложены отдельные составляющие нагрузки.
Все силы и моменты нагрузки, приложенные к механической части электропривода, делятся на силы и моменты механических потерь и силы и моменты, представляющие полезные нагрузки исполнительного механизма. Для схемы рис. 1.1,б в общем виде можно записать
 (1.14)
(1.14)
где  - суммарный приведенный момент потерь, включая момент механических потерь в двигателе; р,q — число моментов и сил в системе, представляющих механические потери; МполΣ — суммарный приведенный момент полезной нагрузки.
- суммарный приведенный момент потерь, включая момент механических потерь в двигателе; р,q — число моментов и сил в системе, представляющих механические потери; МполΣ — суммарный приведенный момент полезной нагрузки.
Полезная нагрузка является одним из главных факторов, связывающих электропривод с технологическим процессом приводимого в движение механизма. Силы и моменты полезной нагрузки в различных механизмах имеют различный характер. Для возможности обобщенного учета их влияния необходимо их классифицировать, выделив ограниченное число типовых нагрузок.
Так как для электропровода имеет важное значение, как зависят момент статической нагрузки от скорости, в дальнейшем используется понятие механической характеристики исполнительного механизма, представляющей собой зависимости  и
и  .
.
По характеру взаимодействия с электроприводом все силы и моменты делятся на активные и реактивные.
Активными силами и моментами называются силы в моменты, создаваемые внешними по отношению к двигателю источниками механической энергии независимо от движения электропривода, например потенциальной энергией перемещаемых по вертикали грузов, энергией ветра и т. п. На рас. 1.3, а упрощенно показан подъемный механизм, нагрузкой которого является приведенный момент силы тяжести груза G:
 (1.15)
(1.15)
где g – ускорение силы тяжести; m – масса груза.
Сила тяжести как при подъеме, так и при спуске груза направлена в одну сторону - в сторону спуска и неизменна по значению. Соответственно механическая характеристика исполнительного механизма в этом случае имеет вид прямой Мс = соnst (рис. 1.3 а). Момент Мс в соответствии с (1.15) зависит от массы поднимаемого или опускаемого груза и может изменяться в пределах от Мс = 0 (G = 0) до Мс = Мс,ном, соответствующего номинальной грузоподъемности (G =G ном).
Более широкие пределы изменения активной нагрузки характерны для уравновешенных подъемных механизмов. На рис. 1.3,б показаны упрощенная схема такого механизма и соответствующие зависимости . В данном случае
 (1.16)
(1.16)
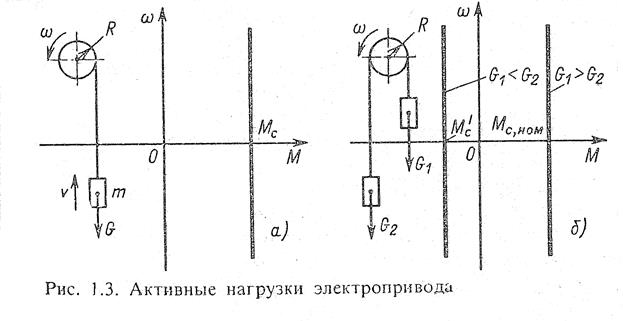
Очевидно, что в таком механизме при G2 = const знак нагрузки электропривода при данном направлении скорости будет зависеть от массы m1 поднимаемого груза G1. При m1= m1ном, , Мс = Мс,ном > 0, так как G1 > G2 . При том же направлении скорости ω > 0 в случае m1 = 0 знак нагрузки в соответствии с (1.14) изменяется. Физически это означает, что по мере уменьшения массы груза G1 тормозной момент нагрузки электропривода уменьшается, при G1 = G2 становится равным нулю и при дальнейшем уменьшении m1 (G1 > G2 ) двигатель должен перейти в тормозной режим, подтормаживая опускающийся груз G2 (рис. 1.3,б). При изменении знака скорости ω < 0 (спуск груза G1) при m1= m1ном двигатель должен работать в тормозном режиме, опуская груз G1, а при m1= 0 — в двигательном режиме, поднимая груз G2.
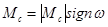
Реактивными силами и моментами называются силы и моменты сопротивления движению, возникающие как реакция на активный движущий момент, развиваемый двигателем, либо любой другой активный движущий момент, например, обусловленный силой тяжести или силой инерции. Эти нагрузки всегда действуют в направлении, противоположном движению электропривода, и изменяют свое направление при изменении знака скорости.
Таким образом, все реактивные силы и моменты зависят от скорости. По характеру этой зависимости различают на грузки типа сухого трения типа вязкого трения и вентиляторного типа.
Силы и моменты сухого трения неизменны по модулю, но скачком изменяют свой знак при изменении знака скорости:
 (1.17)
(1.17)
 Характеристика для нагрузки типа сухого трения показана на рис. 1.4,а. В реальных механизмах эта характеристика может иметь более сложный вид из-за того, что в момент трогания силы трения могут превышать их значения при движении. Эта особенность реальных сил и моментов сухого трения отмечена на рис. 1.4,а штриховыми линиями.
Характеристика для нагрузки типа сухого трения показана на рис. 1.4,а. В реальных механизмах эта характеристика может иметь более сложный вид из-за того, что в момент трогания силы трения могут превышать их значения при движении. Эта особенность реальных сил и моментов сухого трения отмечена на рис. 1.4,а штриховыми линиями.
Реактивные нагрузки, возникающие при различных технологических процессах обработки, могут иметь одно направление, скачком изменяя свое значение до нуля при изменении знака скорости. Примером может служить показанная на рис 1.4,б зависимость момента резания от скорости при обработке изделия резцом, как схематически это показано на рисунке. Значение статического момента при этом пропорционально усилию резания Fz:
Mc= Fz Rи
где Rи — радиус изделия.
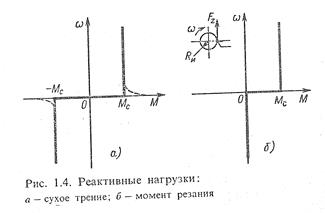
Силы и моменты вязкого трения линейно зависят от скорости:
Mc= βв,т ω (1.18)
где βв,т — коэффициент пропорциональности (рис. 1.5, а).
Нагрузка электропривода типа вязкого трения (1.18) на практике встречается редко, чаще всего ее можно наблюдать в виде слабой линейной составляющей в нагрузке типа сухого трения. Существенное влияние на динамические процессы в механической системе оказывают силы внутреннего вязкого трения, пропорциональные скорости деформации валов, канатов, муфт и других элементов. Момент внутреннего вязкого трения можно записать в виде
Mв,т = β12 (ω1 - ω2) (1.19)
где ω1 и ω2 — скорости на входе и выходе деформируемого элемента; β12 — коэффициент пропорциональности.
По характеру влияния на механические колебания в механике все силы и моменты делятся на консервативные и диссипативные. Консервативными называются силы и моменты, при воздействии которых на систему не происходит поглощения энергии колебаний. Такими являются силы, не зависящие от скорости, в частности сила тяжести, работа которой за период колебаний скорости всегда равна нулю.
Диссипативными называются силы и моменты, при воздействии которых на систему происходит поглощение энергии колебаний.
Вязкое трение является примером диссипативной силы (момента), так как в соответствии с (1.18) при изменении знака скорости изменяется и знак момента, а механическая мощность ΔРмех = ΔМсω сохраняет положительный знак, что соответствует поглощению энергии колебаний.
Реально на практике распространенными являются нагрузки, зависящие от скорости в более высокой степени:
Мс= βмех ωn (1.20)
При n = 2 нагрузка называется вентиляторной (рис. 1.5,б). Такой зависимостью нагрузки от скорости обладают центробежные вентиляторы. Для ряда механизмов показатель степени n > 2; например, такую характеристику имеют центробежньие насосы, работающие на противодавление.
Существенное влияние на динамические процессы оказывают нагрузки, являющиеся периодической функцией угла по ворота рабочего органа механизма. В приведенной схеме они зависят от угла поворота двигателя, например
Мс = Мс maxsinφ (1.21)
Причиной возникновения таких нагрузок являются особенности технологического процесса. Их появление можно пред ставить себе, если в механической схеме резания, приведен ной на рис. 1.4,б предположить, что заготовка имеет в сечении овальную форму. Появление периодических нагрузок могут вызывать нелинейные кинематические связи типа кривошипно-шатунных, кулисных и других механизмов, у которых периодической функцией угла поворота двигателя является радиус приведения ρ1j.
Во всех случаях, когда скорость двигателя при работе с такими нагрузками изменяется мало и приближенно может быть принята постоянной, для упрощения анализа периодические нагрузки рассматривают как функции времени:
Мс = Мс maxsin k ωсрt, (1.22)
где ωср - средняя за период колебаний нагрузки скорость электропривода; k — коэффициент пропорциональности, связывающий частоту колебаний нагрузки с угловой скоростью двигателя.
Нагрузки реальных электроприводов обычно содержат в качестве составляющих рассмотренные типовые нагрузки. Так, в нагрузке электропривода реальной подъемной лебедки кроме показанной на рис. 1.3,а активной составляющей содержатся момент потерь в двигателе и передачах, который имеет вид момента сухого трения со слабой венталяторной составляющей, обусловленной наличием самовентиляции двигателя.
При вычислении приведенного статического момента Мс формулы (1.13) и (1.14) удобны для использования в тех случаях, когда все действующие в механизме силы и моменты определены. Обычно потери на трение в механизме неизвестны, и для их учета используется КПД механизма
ηмех = η1, η2, η3…,
где η1, η2, η3…— КПД элементов кинематической цепи.
Если известен полезный момент нагрузки механизма Ммех, то для прямого направления энергии приведенный к валу двигателя момент статической нагрузки может быть определен из равенства
Мс ω1 = Ммех ωмех /ηмех+ ΔМω1. (1.23)
Следовательно
Мс = Ммех / i0 ηмех+ ΔМ, (1.24)
где ΔМ — момент механических потерь в двигателе; i0 = ω1/ωмех = i1 i2 i3 — общее передаточное число от двигателя к рабочему органу механизма.
При обратном направлении потока энергии, когда нагрузка является активной, движущей и двигатель должен работать в тормозном режиме, уравнение баланса мощностей с помощью КПД передач можно записать так:
Мс ω1 = Ммех ωмех ηмех - ΔМω1 (1.25)
В этом случае
Мс = (Ммех / i0 )ηмех – ΔМ (1.26)
Момент механических потерь в двигателе невелик, составляет 1 - 5 % номинального момента двигателя, причем большие значения его соответствуют двигателям небольшой мощности. Если значение ΔМ определить трудно, его можно ориентировочно оценить по этим данным. Во многих практических случаях в (1.24) и (1.26) полагают ΔМ ≈ 0, так как точность определения момента Ммех невелика, и он рассчитывается с некоторым запасом, при этом формулы приведения момента статической нагрузки к валу двигателя принимают вид:
для прямого направления передачи энергии (двигательный режим работы двигателя)
Мс = Ммех / i0 ηмех (1.27)
для обратного (тормозной режим работы двигателя)
Мс = (Ммех / i0 )ηмех (1.28)
Если рабочий орган движется поступательно уравнение баланса мощностей при прямом направлении потока энергии, принимая ΔМ = 0, можно записать так:
Мс = Fмех υмех/ηмех
Откуда
Мс = (Fмех/ηмех)ρ (1.29)
Соответственно для обратного направления потока механической энергии
Мс = Fмех ρ ηмех (1.30)
Необходимо иметь в виду, что КПД передач зависит от нагрузки, а для червячного зацепления — и от направления передачи энергии, поэтому при расчетах для правильного определения Мс следует использовать соответствующие зависимости η от полезной нагрузки передач.
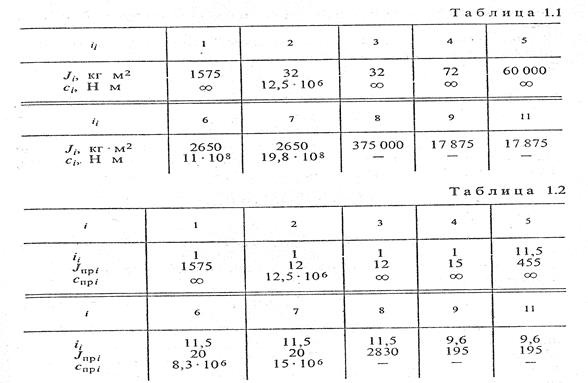
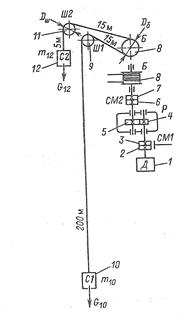
П р и м е р 1.1. Составить расчетную схему механической части электропривода скиповой шахтной подъемной установки при нижнем положении загруженного скипа (рис. 1.6).
Данные для расчета: передаточное число редуктора iр = 11,5; КПД редуктора ηр = 0,95; диаметр барабана Dб = 6 м; диаметр направляющих шкивов Dш = 5 м; жесткость одного метра подъемного каната ск = = 2*108 Н. Моменты инерции вращательно движущихся элементов установки Ji и жесткости механических связей i-го элемента с(i + 1)-м элементом сi (рис. 1.6) указаны в табл. 1.1.
Массы поступательно движущихся элементов: загруженного скипа m10= 10950 кг; порожнего скипа m12= 4950 кг. Распределенная масса каната, трение в подшипниках Ш1 и Ш2, а также трение в направляющих скипов, которые при проектировании следует иметь в виду, в данном примере в целях упрощения не учитываются.
 |
Определим передаточное число от вала двигателя к осям вращения направляющих шкивов Ш1 и Ш2.
i 1 9 = i 111= iр(Dш/ Dб)=11,5(5/6)=9,6.
Радиус приведения для поступательно движущихся элементов установки
ρ = υ10/ωдв = Dб/2ip=6/2*11,5=0,26 м.
Результаты расчета приведенных к валу двигателя моментов инерции по Jпрi (1.3) и жесткостей спрi (1.8) представлены в табл. 1.2.
Приведенные моменты инерции поступательно движущихся элементов установки:
Jпр 10 = m 10 ρ2 = 10950*0.262=738 кг*м2
Jпр 12 = m 12 ρ2 = 10950*0.262=335 кг*м2
Приведенные жесткости участков каната между барабаном Б и шкивами Ш1 и Ш2:
(с 8-9)пр = ск ρ2/l 8-9 = 2*108*0,262/15 = 0,91*106 Н*м
(с 8-11)пр = ск ρ2/l 8-11 = (с 8-9)пр = 0,91*106 Н*м
Приведенная жесткость участка каната между груженым скипом и шкивом Ш1
(с 9-10)пр = ск ρ2/l 8-9 = 2*108*0,262/15 = 0,91*106 Н*м
То же между порожним скипом и шкивом Ш2:
(с 11-12)пр = ск ρ2/l 11-12 = 2*108*0,262/5 = 2,7*106 Н*м
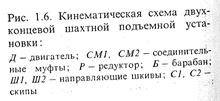
По полученным значениям Jпрi, Jпрj, спрi и спрj на рис. 1.7,а построена исходная расчетная схема механической части электропривода, на которой площади прямоугольников, изображающих приведенные моменты инерции, пропорциональны их значениям, а длины соединений между ними обратно пропорциональны значениям приведенных жесткостей связей.
Рассматривая рис. 1.7,а, можно убедиться, что механическая часть электропривода двухконцевой подъемной установки представляет собой разветвленную механическую систему. В положении скипов, для которого получена эта схема, порожний скип С2 (элемент 12) связан с барабаном Б (элемент 8) через направляющий шкив Ш2 (элемент 11) большой жесткостью, которую при составлении упрощенной расчетной схемы можно принять равной бесконечности. Схема, учитывающая это упрощение, приведена на рис. 1.7,б.
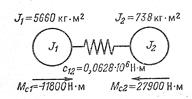
 Жесткости связей между массами на рис. 1.7,б таковы, что без большой погрешности механическую часть данного электропривода можно представить в виде двухмассовой упругой системы, показанной на рис. 1.8. В этой схеме
Жесткости связей между массами на рис. 1.7,б таковы, что без большой погрешности механическую часть данного электропривода можно представить в виде двухмассовой упругой системы, показанной на рис. 1.8. В этой схеме
Ji = J’1 +J2 +J3 +J4 +Jпр5 +Jпр6 +Jпр7 +Jпр8 +Jпр9 +Jпр11+ Jпр12= 1575 + 12 + 12 + 15 + 455 + 20 +20 +
+ 2830+ 195 + 195 + 335 = 5664 кг*м2;
J2 = Jпр10 = 738 кг*м2;
с 1 2 = 
= 0,0628*106 Н*м
Рассчитаем нагрузки, действующие в этой схеме. Силы тяжести за груженного С1 и порожнего С2 скипов.
G10 = m10g=10950*9,81 = 107 000 Н;
 G12 = m12g=4950*9,81 = 48 500 Н
G12 = m12g=4950*9,81 = 48 500 Н
Соответствующие приведенные значения момента:
Мс10 = G10ρ = 107 000* 0, 26 = 27 900 Н*м;
Мс12 = G12ρ = 48 500* 0, 26 = 12 600 Н*м
Моменты Мс 10 и Мс12 показаны на схеме рис. 1.7 стрелками, определяющими их место приложения и направление относительно указанного положительного направления скорости двигателя ω1. Момент потерь в редукторе определяется текущими значениями нагрузки передачи. Его можно приближенно принять постоянным и равным моменту, соответствующему статическому режиму:
 |
Соответственно в расчетной схеме на рис. 1.8 моменты нагрузки имеют значения:
Мс1 = Мс12 + Δ Мр = -12 600 + 805 = -11 800 Н*м;
Мс2 = Мс10 = 27 900 Н*м.
4. Уравнения движения электропривода
 Механическая часть электропривода представляет собой систему твердых тел, на движение которых наложены ограничения, определяемые механическими связями. Уравнения механических связей устанавливают соотношения между перемещениями в системе, а в тех случаях, когда задаются соотношения между скоростями ее элементов, соответствующие уран нения связей обычно интегрируются. В механике такие связи называются голономными, В системах с голономными связями число независимых переменных - обобщенных координат, определяющих положение системы, — равно числу степеней свободы системы. Известно, что наиболее общей формой записи дифференциальных уравнений движения таких систем являются уравнения движения в обобщенных координатах (уравнения Лагранжа):
Механическая часть электропривода представляет собой систему твердых тел, на движение которых наложены ограничения, определяемые механическими связями. Уравнения механических связей устанавливают соотношения между перемещениями в системе, а в тех случаях, когда задаются соотношения между скоростями ее элементов, соответствующие уран нения связей обычно интегрируются. В механике такие связи называются голономными, В системах с голономными связями число независимых переменных - обобщенных координат, определяющих положение системы, — равно числу степеней свободы системы. Известно, что наиболее общей формой записи дифференциальных уравнений движения таких систем являются уравнения движения в обобщенных координатах (уравнения Лагранжа):
(1.31)
 где Wk — запас кинетической энергии системы, выраженный через обобщенные координаты qi и обобщенные скорости qi; Qi = δАi/ δqi обобщенная сила, определяемая суммой элементарных работ δАi всех действующих сил на возможном перемещений δqi или
где Wk — запас кинетической энергии системы, выраженный через обобщенные координаты qi и обобщенные скорости qi; Qi = δАi/ δqi обобщенная сила, определяемая суммой элементарных работ δАi всех действующих сил на возможном перемещений δqi или
(1.32)
где L — функция Лагранжа; Qi’ — обобщенная сила, определяемая суммой элементарных работ δАi всех внешних сил на возможном перемещении δqi.
Функция Лагранжа представляет собой разность кинетической Wk и потенциальной Wп энергий системы, выраженных через обобщенные координаты и обобщенные скорости qi т. е.
L= Wk - Wп (1.33)
Уравнения Лагранжа дают единый достаточно простой метод математического описания динамических процессов в механической части привода; их число определяется только числом степеней свободы системы.
 В качестве обобщенных координат могут быть приняты как различные угловые, так и линейные перемещения в системе. Поэтому при математическом описании динамики механической части привода с помощью уравнений Лагранжа предварительного приведения ее элементов к одной скорости не требуется. Однако, как было отмечено, до выполнения операции приведения в большинстве случаев невозможно количественно сопоставлять между собой различные массы системы и жесткости связей между ними, следовательно, невозможно выделить главные массы и главные упругие связи, определяющие минимальное число степеней свободы системы подлежащее учету при проектировании. Поэтому составление приведенных расчетных механических схем и их возможное упрощение являются первым важным этапом расчета сложных электромеханических систем электропривода независимо от способа получения их математического описания.
В качестве обобщенных координат могут быть приняты как различные угловые, так и линейные перемещения в системе. Поэтому при математическом описании динамики механической части привода с помощью уравнений Лагранжа предварительного приведения ее элементов к одной скорости не требуется. Однако, как было отмечено, до выполнения операции приведения в большинстве случаев невозможно количественно сопоставлять между собой различные массы системы и жесткости связей между ними, следовательно, невозможно выделить главные массы и главные упругие связи, определяющие минимальное число степеней свободы системы подлежащее учету при проектировании. Поэтому составление приведенных расчетных механических схем и их возможное упрощение являются первым важным этапом расчета сложных электромеханических систем электропривода независимо от способа получения их математического описания.
Получим уравнения движения, соответствующие обобщенным расчетным механическим схемам электропривода, представленным на рис. 1.2. В трехмассовой упругой системе обобщенными координатами являются угловые перемещения масс φ1, φ2, φ3 , им соответствуют обобщенные скорости ω1, ω2 и ω3. Функция Лагранжа имеет вид
 L= Wk - Wп = (1.34)
L= Wk - Wп = (1.34)
Для определения обобщенной силы Q’1 необходимо вычислить элементарную работу всех приложенных к первой массе моментов на возможном перемещении:
δА1= (М - Мс1)δφ1
Следовательно,
Q’1 = М - Мс1 (1.35)
Аналогично определяются две другие обобщенные силы:
Q’2 = - Мс2 ; Q’3 = - Мс3. (1.36)
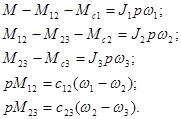
Подставляя (1.34) в (1,36) и учитывая (1.35) и (1.36), получаем следующую систему уравнений движения:
 | |||
 | |||
(1.37)
В (1.37) пропорциональные деформациям упругих связей моменты являются моментами упругого взаимодействия между движущимися массами системы:
 (1.38)
(1.38)
 С учетом (1.38) систему уравнений движения можно представить в виде
С учетом (1.38) систему уравнений движения можно представить в виде

(1.39)
Рассматривая (1.39), можно установить, что уравнения движения приведенных масс электропривода однотипны. Они отражают физический закон (второй закон Ньютона), в соответствии с которым ускорение твердого тела пропорционально сумме всех приложенных к нему моментов (или сил), включая моменты и силы, обусловленные упругим взаимодействием с другими твердыми телами системы.

 Очевидно, повторять вывод уравнений движения вновь, переходя к рассмотрению двухмассовой упругой системы, нет необходимости. Движение двухмассовой системы опись системой (1.39) при J3 = 0 и М23 = 0:
Очевидно, повторять вывод уравнений движения вновь, переходя к рассмотрению двухмассовой упругой системы, нет необходимости. Движение двухмассовой системы опись системой (1.39) при J3 = 0 и М23 = 0:
(1.40)
где  .
.
Переход от двухмассовой упругой системы к эквивалентному жесткому приведенному механическому звену для большей наглядности его физической сути полезно выполнить в два этапа. Вначале положим механическую связь между первой и второй массами (см. рис. 1.2,б) абсолютно жесткой (с12 = ∞). Получим двухмассовую 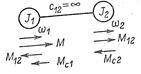 жесткую систему, расчетная схема которой показана на рис. 1.9. Отличием ее от схемы на рис. 1.2,б является равенство скоростей масс ω1 = ω2 = ω при этом в соответствии со вторым уравнением
жесткую систему, расчетная схема которой показана на рис. 1.9. Отличием ее от схемы на рис. 1.2,б является равенство скоростей масс ω1 = ω2 = ω при этом в соответствии со вторым уравнением 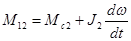 системы (1.40)
системы (1.40)
(1.41)
 Уравнение (1.41) характеризует нагрузку жесткой механической связи при работе электропривода. Подставив это выражение в первое уравнение системы (1.40), получим
Уравнение (1.41) характеризует нагрузку жесткой механической связи при работе электропривода. Подставив это выражение в первое уравнение системы (1.40), получим
 Следовательно, с учетом обозначений на рис. 1.2, в Мс = Мс1 + Мс2; JΣ = J1+J2, и уравнение движения электропривода имеет вид
Следовательно, с учетом обозначений на рис. 1.2, в Мс = Мс1 + Мс2; JΣ = J1+J2, и уравнение движения электропривода имеет вид
(1.42)
Это уравнение иногда называют основным уравнением движения электропривода действительно, значение его для анализа физических процессов в электроприводе исключительно велико. Как будет показано далее, оно правильно описывает движение механической части электропривода в среднем. Поэтому с его помощью можно по известному электромагнитному моменту двигателя и значениям Мс и JΣ оценить среднее значение ускорения электропривода предсказать время, за которое двигатель достигнет заданной скорости, и решить многие другие практические вопросы даже в тех случаях, когда влияние упругих связей в системе существенно.
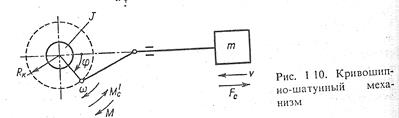
 Как было отмечено, передачи ряда электроприводов содержат нелинейные кинематические связи, типа кривошипно-шатунных, кулисных и других подобных механизмов. Для таких механизмов радиус приведения является переменной величиной, зависящей от положения механизма, и при получении математического описания необходимо это обстоятельство учитывать, В частности, для приведенной на рис. 1.10 схемы кривошипно-шатунного механизма
Как было отмечено, передачи ряда электроприводов содержат нелинейные кинематические связи, типа кривошипно-шатунных, кулисных и других подобных механизмов. Для таких механизмов радиус приведения является переменной величиной, зависящей от положения механизма, и при получении математического описания необходимо это обстоятельство учитывать, В частности, для приведенной на рис. 1.10 схемы кривошипно-шатунного механизма
(1.43)
где Rk - радиус кривошипа.
Имея в виду механизмы, аналогичные показанному на рис. 1.10, рассмотрим двухмассовую систему, первая масса которой вращается со скоростью двигателя ω и представляет собой суммарный приведенный к валу двигателя момент инерции всех жестко и линейно связанных вращающихся элементов J1, а вторая масса движется с линейной скоростью υ и представляет собой суммарную массу m элементов, жестко и линейно связанных с рабочим органом механизма. Связь между скоростями ω и υ нелинейна, причем ρ = ρ (φ). Для получения уравнения движения такой системы без учета упругих связей воспользуемся уравнением Лагранжа (1.31), приняв в качестве обобщенной координаты угол φ. Вначале определим обобщенную силу:
Qδφ = Mδφ- М'с δφ-Fc δS,
где М'с - суммарный момент сопротивления от сил, воздействующих на линейно связанные с двигателем массы, приведенный к валу двигателя; Fc — результирующая всех сил, приложенных к рабочему органу механизма и линейно связанным с ним элементам; δS - возможное бесконечно малое перемещение массы m. Следовательно,
Q= M - М'с - Fc ρ(φ)= M - Мс (φ),
где ρ (φ) =δS/ δφ - радиус приведения.
При наличии нелинейной механической связи рассматриваемого типа момент статической нагрузки механизма содержит пульсирующую составляющую нагрузки, изменяющуюся в функции угла поворота φ:
Мс (φ) = М'с + Fc ρ(φ). (1.44)
 Запас кинетической энергии системы
Запас кинетической энергии системы
здесь JΣ(φ) — суммарный приведенный к валу двигателя момент инерции системы.
В применении к данному случаю левая часть уравнения (1.31) записывается так:
 |
 |
 Таким образом, в рассматриваемом случае уравнение движения жесткого приведенного звена имеет вид
Таким образом, в рассматриваемом случае уравнение движения жесткого приведенного звена имеет вид
(1.45)
Рассматривая (1.45), нетрудно установить, что при наличии нелинейных механических связей уравнение движения электропривода существенно усложняется, так как становится нелинейным, содержит переменные коэффициенты, зависящие от углового перемещения ротора двигателя, и момент нагрузки, являющийся периодической функцией угла поворота.
Полученные математические описания динамических процессов в механической части электропривода, представляемой обобщенными схемами, позволяют анализировать возможные режимы движения электропривода. Условием динамического процесса в системе, описываемой (1.42), является dω/dt ≠ 0, т. е. наличие изменений скорости электропривода. Для анализа статических режимов работы электропривода необходимо положить dω/dt = 0. Соответственно уравнение статического режима работы электропривода с жесткими и линейными механическими связями имеет вид
M = Мс =const
Если при движении M ≠ Мс, dω/dt ≠ 0, то имеет место или динамический переходный процесс, или установившийся динамический процесс. Последнее соответствует случаю, когда приложенные к системе моменты содержат периодическую составляющую, которая после переходного процесса определяет принужденное движение системы с периодически изменяющейся скоростью.
В механических системах с нелинейными кинематическими связями в соответствии с (1.45) статические режимы работы отсутствуют. Если dω/dt = 0 и ω=const, в таких системах имеет место установившийся динамический процесс движения. Он обусловлен тем, что массы, движущиеся линейно, совершают принужденное возвратно-поступательное движение, и их скорость в ускорение являются переменными величинами.
С энергетической точки зрения режимы работы электропривода разделяются на двигательные и тормозные, отличающиеся направлением потока энергии через механические передачи привода. Двигательный режим соответствует прямому направлению передачи механической энергии вырабатываемой двигателем к рабочему органу механизма. Этот режим обычно является основным для проектирования механического оборудования, в частности редукторов. Однако при работе электропривода достаточно часто складываются условия для обратной передачи механической энергии от рабочего органа механизма к двигателю, который при этом должен работать в тормозном режиме. В частности, для электроприводов с активной нагрузкой двигательный и тормозной режимы работы вероятны практически в равной степени. Тормозные режимы работы электропривода возникают также в переходных процессах замедления системы, в которых освобождающаяся кинетическая энергия может поступать от соответствующих масс к двигателю.
Изложенные положения позволяют сформулировать правило знаков момента двигателя, которое следует иметь в виду при использовании полученных уравнений движения. При прямом направлении передачи механической мощности Р = Мω ее знак положителен, следовательно, движущие моменты двигателя должны иметь знак, совпадающий со знаком скорости. В тормозном режиме Р < 0, поэтому тормозные моменты двигателя должны иметь знак, противоположный знаку скорости.
При записи уравнений движения были учтены направления моментов, показанные на обобщенных расчетных схемах, в частности на рис 1.2,в. Поэтому правило знаков для моментов статической нагрузки другое: тормозные моменты нагрузки должны иметь знак, совпадающий со знаком скорости, а движущие активные нагрузки — знак, противоположный знаку скорости.
5. Механическая часть электропривода как объект управления
Полученные уравнения движения позволяют проанализировать динамические особенности механической части электропривода как объекта управления, пользуясь методами теории автоматического управления. Основой для анализа являются структурные схемы, вид которых определяется принятой рас четной схемой механической части.
Получим структурные схемы для расчетных схем, представленных на рис 1.2, с их помощью проведем анализ свойств механической части электропривода и оценим погрешности, вносимые пренебрежением упругими механическими связями.
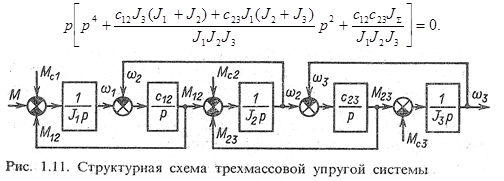
 Для получения структурной схемы трехмассовой упругой механической системы продифференцируем (1.38):
Для получения структурной схемы трехмассовой упругой механической системы продифференцируем (1.38):
(1.46)
 Далее положим в (1.39) и (1.46) d/dt = p:
Далее положим в (1.39) и (1.46) d/dt = p:
 |
(1.47)
Системе уравнений (1.47) соответствует структурная схема, приведенная на рис. 1.11. Она дает представление о механической части электропривода в виде трехмассовой системы как об объекте управления. Управляющим воздействием здесь является электромагнитный момент двигателя М, а возмущениями — моменты нагрузки Мс1 , Мс2 и Мс3. Регулируемыми переменными могут быть скорости ω1 , ω2 и ω3, перемещения φ1, φ2 и φ3, а также нагрузки упругих связей М12 и М23.
Структурно механическая часть электропривода представляет собой сложный объект, состоящий из цепочки интегрирующих звеньев, замкнутых перекрестными внутренними обратными связями. Пользуясь известными методами преобразования структурных схем и определения передаточных функций для замкнутых обратными связями контуров [10, 11], получим передаточную функцию механической части по управляющему воздействию при выходной переменной ω1(р):
 |
(1.48)
Характеристическое уравнение запишем в виде
 |
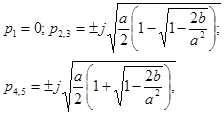 Решив биквадратное уравнение, получим корни характеристического уравнения системы:
Решив биквадратное уравнение, получим корни характеристического уравнения системы:
(1.49)
 |
где
 Анализ корней показывает, что при всех реальных сочетаниях параметров подкоренные выражения (1.49) представляют собой действительные положительные числа. Следовательно,
Анализ корней показывает, что при всех реальных сочетаниях параметров подкоренные выражения (1.49) представляют собой действительные положительные числа. Следовательно,
Корни характеристического уравнения свидетельствуют о том, что система может быть представлена в виде последовательного соединения интегрирующего звена и двух консервативных колебательных звеньев с резонансными частотами колебаний Ω1 и Ω2. При изменении момента М (р) скачком в системе могут возникать незатухающие колебания с частотами Ω1 и Ω2, а в случаях, когда частота возмущающих воздействий совпадает с одной из этих частот, в системе развивается недемпфированный резонанс, при котором амплитуды колебаний теоретически могут возрастать до бесконечности. Реально в системе присутствуют диссипативные силы, которые демпфируют колебания, ограничивая резонансные амплитуды большими, но конечными значениями.
Более детальный анализ свойств упругих механических систем можно провести на основе двухмассовой расчетной схемы, структура которой представлена на рис. 1.12а. Она составлена на основе (1.47) при М23 = 0, Мс3 = 0 и J3=0. Для исследования свойств этой системы как объекта управления примем возмущения Мс1 = Мс2 = 0 и выполним показанные на рис. 1.12,б - г преобразования ее структуры. Прежде всего перенесем внутреннюю связь по упругому моменту на выход системы, как показано на рис. 1.12,б. Эта операция позволит определить передаточную функцию, связывающую выходную координату со скоростью ω1:
 (1.50)
(1.50)
Далее определяется передаточная функция двухмассовой системы по управлению при выходной переменной ω1, аналогичная рассмотренной выше для трехмассовой системы (1.48). В соответствии со схемой рис. 1.12,б передаточная функция прямого канала
 |
Wпр = 1/J1p,
 а обратной связи
а обратной связи
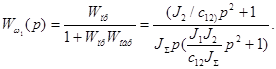 Следовательно, искомая передаточная функция с учетом (1.50) определится так:
Следовательно, искомая передаточная функция с учетом (1.50) определится так:
(1.51)
Характеристическое уравнение системы
 |
 Корни характеристического уравнения
Корни характеристического уравнения
(1.52)
где Ω12 — резонансная частота двухмассовой упругой системы.
Сравнение (1.52) с (1.49) показывает, что при переходе от трехмассовой к двухмассовой упругой системе выявляется только одна частота Ω12 , на которой возможно проявление механического резонанса. Однако если при этом значение Ω12 оказывается достаточно близким к одной из парциальных частот исходной системы Ω1 или Ω2, можно полагать, что двухмассовая система правильно отражает главные особенности механической части электропривода.
Для удобства анализа введем следующие обобщенные параметры двухмассовой упругой системы:
γ= (J1+J2)/ J1 = JΣ/J1 — соотношение масс;
 — резонансная частота системы;
— резонансная частота системы;
 - резонансная частота второй массы при жесткой заделке первой (J1→∞).
- резонансная частота второй массы при жесткой заделке первой (J1→∞).
 С учетом этих обозначений (1.50) и (1.51) могут быть представлены в виде
С учетом этих обозначений (1.50) и (1.51) могут быть представлены в виде
(1.53)
(1.54)
Полученные соотношения (1.53) и (1.54) позволяют представить механическую часть электропривода как объект управления в виде трех звеньев, показанных на рис. 1.12,в. С помощью этой схемы нетрудно записать и передаточную функцию системы по управляющему воздействию при выходной переменной ω2:
 |
(1.55)
 Передаточной функции (1.55) соответствует структурная схема объекта, представленная на рис. 1.12, г. Для анализа свойств системы воспользуемся частотным методом теории управления. Уравнение амплитудно-фазовой характеристики (АФХ) получим, подставив в (1.54) р = j Ω:
Передаточной функции (1.55) соответствует структурная схема объекта, представленная на рис. 1.12, г. Для анализа свойств системы воспользуемся частотным методом теории управления. Уравнение амплитудно-фазовой характеристики (АФХ) получим, подставив в (1.54) р = j Ω:
(1.56)
где  - амплитудно-частотная характеристика (АЧХ);
- амплитудно-частотная характеристика (АЧХ);  - фазо-частотная характеристика (ФЧХ) объекта при выходной переменной ω1.
- фазо-частотная характеристика (ФЧХ) объекта при выходной переменной ω1.
Прежде чем перейти к построению логарифмических частотных характеристик, необходимо обратить внимание на то, что при анализе механической и электрической частей системы электропривода здесь и в дальнейшем рассматриваются их передаточные функции, в которых выходная и входная переменные чаще всего имеют различные единицы измерения. В этих случаях  представляет собой не комплексный коэффициент усиления, а комплексный коэффициент передачи, имеющий определенную единицу измерения. В частности, в (1.56) его единица 1/(Н*м*с), такую же единицу размерности имеет величина . При необходимости все дифференциальные уравнения и передаточные функции системы могут быть представлены в относительных единицах. Эта возможность используется при расчетах и исследованиях электроприводов.
представляет собой не комплексный коэффициент усиления, а комплексный коэффициент передачи, имеющий определенную единицу измерения. В частности, в (1.56) его единица 1/(Н*м*с), такую же единицу размерности имеет величина . При необходимости все дифференциальные уравнения и передаточные функции системы могут быть представлены в относительных единицах. Эта возможность используется при расчетах и исследованиях электроприводов.
В данном курсе, чтобы не осложнять понимание физического смысла явлений и параметров, представление переменных в относительных единицах, как правило, не используется. При этом для выражения АЧХ в логарифмическом масштабе единицы амплитуд опускаются, то соответствует относительным их значениям при базовом значении, равном единице измерения.