Мультимедийные проекторы
В мультимедийном проекторе проекционная лампа, ЖК-матрица и оптическая система конструктивно размещаются в одном корпусе, что делает их похожими на диапроекторы, предназначенные для просмотра слайдов или диафильмов. По принципу действия мультимедийный проектор не отличается от оверхед-проектора: изображение создается с помощью мощной проекционной лампы и встроенного в проектор электронно-оптического модулятора, управляемого сигналом видеоадаптера ПК, а затем посредством оптической системы проецируется на внешний экран. Основным отличием в мультимедийных проекторах является конструкция модулятора и способы построения и переноса изображения на экран. В зависимости от конструкции модулятора проекторы бывают следующих типов: TFT-проекторы; полисиликоновые проекторы и DMD/DLP-проекторы.
В зависимости от способа освещения модулятора мультимедийные проекторы подразделяют на проекторы просветного и отражательного типов.
В TFT-проекторах, относящихся к проекторам просветного типа, в качестве модулятора используется малогабаритная цветная активная ЖК‑матрица, выполненная по технологии TFT. Принцип действия мультимедийного TFT-проектора просветного типа иллюстрирует рис. 4.6.
Основным элементом установки является миниатюрная ЖК-матрица, выполненная по технологии TFT, как и ЖК-экран плоскопанельного цветного монитора. Равномерное освещение поверхности ЖК-матрицы достигается за счет применения системы линз, называемой конденсором.
| Рис. 4.7. Принцип действия полисиликонового мультимедийного проектора просветного типа |


| Рис. 4.6. Принцип действия мультимедийного TFT-проектора просветного типа |
Цветоделительная система полисиликонового проектора, состоящая из двух дихроичных (D1, D2) и одного обычного (N1,) зеркал, используется для разложения белого света проекционной лампы на три составляющие основных цветов (красный, зеленый, синий). Цветоделение необходимо выполнить для того, чтобы подать на каждую из трех монохромных матриц световой поток соответствующего цвета. Дихроичное (цветоделительное) зеркало пропускает свет только одной длины волны (один цвет) и представляет собой хорошо отполированную стеклянную подложку с нанесенной на него тонкой пленкой из диэлектрического материала.
Система цветосмешения полисиликонового проектора состоит из двух дихроичных (D3, D4) и одного отражающего (N2) зеркал и служит для получения цветного изображения путем наложения одного на другой трех монохромных изображений, создаваемых соответствующими ЖК‑матрицами.

| Рис. 4.8. Схема трехматричного отражательного мультимедийного проектора |
ЖК-проекторы отражательного типа предназначены для работы в больших аудиториях и отличаются по принципу действия: модуляции подвергается не проходящий, а отраженный световой поток.
В настоящее время наиболее используемой в конструкциях ЖК‑проекторов отражательного типа является технология DMD/DLP, разработанная фирмой Texas Instruments.
В DMD/DLP-проекторах отражательного типа излучение источника света модулируется изображением при отражении от матрицы. В DMD/DLP‑проекторах в качестве отражающей поверхности используется матрица, состоящая из множества электронно-управляемых микрозеркал, размер каждого из которых около 1 мкм. Каждое микрозеркало имеет возможность отражать падающий на него свет либо в объектив, либо в поглотитель, что определяется уровнем поданного на него электрического сигнала. При попадании света в объектив образуется яркий пиксель экрана, а в поглотитель — темный. Такие матрицы обозначаются аббревиатурой DMD (Digital Micromirror Device — цифровой микрозеркальный прибор); а технология, на которой основан их принцип действия, — DLP (Digital Light Processing — цифровая обработка света).
Как правило, в одной DMD-матрице содержится около 848 ´ 600 = 508 800 микрозеркал, что превосходит SVGA-разрешение (800×600 = 480 000 пикселей).
Для получения цветного изображения используются проекторы двух вариантов: с тремя или одной DMD-матрицей. Трехмат-ричный проектор, схема которого дана на рис. 4.8, по способу формирования цветного изображения аналогичен полисиликоновому (см. рис. 4.7).
В одноматричных DMD/DLP-проекторах полный цветной кадр формируется в результате последовательного наложения трех быстро меняющихся монохромных кадров: черно-красного, черно-зеленого и черно-синего. Смена монохромных кадров на экране незаметна благодаря инерционности человеческого зрения. Монохромные кадры образуются при последовательном освещении DMD-матрицы лучом красного, зеленого и синего цветов. Луч каждого цвета образуется за счет пропускания светового потока от проекционной лампы через вращающийся диск с красным, зеленым и синим светофильтрами, как это показано на схеме од-номатричного проектора (рис. 4.9). Управление микрозеркалами синхронизировано с поворотом светофильтра.
По сравнению с ЖК-технологиями технология DLP обладает следующими преимуществами: практически полным отсутствием зернистости изображения, высокой яркостью и равномерностью ее распределения. К недостаткам одноматричных DMD‑проекто-ров следует отнести заметное мелькание кадров.

| Рис. 4.9. Схема одноматричного отражательного мультимедийного проектора |
4.3. Устройства формирования объемных изображений
Устройства формирования объемных (трехмерных) изображений появились в качестве весьма дорогостоящих и недостаточно совершенных элементов системы виртуальной реальности. Однако в настоящее время эти устройства интенсивно совершенствуются, постепенно превращаясь в непременный атрибут домашнего мультимедийного ПК, поскольку объемный характер изображения имеет важнейшее значение для создания у пользователя подсознательного ощущения реальности наблюдаемой сцены.
По своей конструкции такие устройства принципиально отличаются от традиционных мониторов, поскольку в их основе лежит способ формирования трехмерных изображений, основанный на эффекте бинокулярного зрения, или стереозрения.
Особенности восприятия человеком объемных изображений определяются следующими факторами: первичными (врожденными), основанными на использовании бинокулярного зрения, и вторичными, основанными на накопленном человеком опыте ориентации в пространстве и позволяющими оценить глубину наблюдаемого объекта по косвенным признакам, доступным при монокулярном зрении.
Важнейшими, безусловно, являются вторичные факторы. Поэтому в данной главе рассмотрим устройства отображения, основанные именно на этом свойстве, т.е. использующие бинокулярное зрение человека.
Объемное восприятие объектов возможно как при бинокулярном, так и при монокулярном зрении, поэтому иллюзию трехмерности изображения можно создать при помощи традиционных двухмерных устройств отображения (телевизора, монитора). Например, фотоснимок сам по себе является двухмерным, плоским изображением, однако при его просмотре человек подсознательно оценивает его особенности, благодаря чему создается достаточно четкое представление о форме и пространственном положении изображенных объектов.
Особенности объемного изображения (тени, взаимное положение и т.д.) можно создавать на искусственных моделях виртуального компьютерного мира. Сегодня бурно развивается новая технология, которую принято называть трехмерной графикой, или 3D. В основе этой технологии лежит такой подход: все объекты компьютерного мира описываются в трехмерной системе координат. Имея математическое описание трехмерного объекта, можно корректно рассчитать его двухмерную проекцию на плоскость экрана, которая будет обладать всеми свойствами трехмерного объекта. Поскольку объем вычислений, необходимый для расчета трехмерной сцены, исключительно велик, эту работу выполняют специализированные графические процессоры, называемые ускорителями трехмерной графики, или 3D-акселераторами, которые подробнее будут рассмотрены в подразд. 4.4. Ярким примером 3D-графики являются многочисленные трехмерные компьютерные игры.
Механизм бинокулярного зрения связан с явлением одновременного раздражения светом горизонтально расположенных несимметричных точек сетчатки глаз. Асимметрия этих точек обусловлена тем, что оба глаза, расположенные один от другого на расстоянии 6-7 см по горизонтали, видят один и тот же объект под разными углами. Благодаря этому проекции объекта на глазном дне каждого глаза оказываются смещенными в горизонтальном направлении. Головной мозг анализирует эти проекции, в результате чего у человека создается ощущение объемности объекта. Практический способ формирования стереоизображения заключается в том, что два изображения одного и того же предмета, как показано на рис. 4.10, проецируемые на каждый глаз, разворачиваются в горизонтальной плоскости один относительно другого на небольшой угол, образуя так называемую стереопару. Такой стереоскоп позволяет видеть объемное изображение за счет раздельного наблюдения каждым глазом двух почти одинаковых плоских изображений, образующих стереопару.
| Рис. 4.10. Принцип формирования стереопары |

Принцип действия стереоскопа реализуется во всех современных устройствах формирования объемных изображений. Однако используемые в них конкретные способы формирования стереопары отличаются между собой. Чтобы каждый глаз мог видеть только одну половину стереопары, существуют два основных способа:
• использование для каждого глаза отдельного экрана (двухэкранный способ);
• проецирование двух изображений, составляющих стереопару, на общий экран с последующей селекцией элементов стереопары, обеспечивающей их раздельный показ каждому глазу (одноэкранный способ).
Двухэкранные устройства основаны на использовании в качестве двух экранов миниатюрных ЭЛТ, с помощью которых удается получить весьма высокое разрешение (до 1280×1024 на каждом экране), однако все устройство отображения получается весьма тяжелым и громоздким, поэтому для его крепления около глаз используют специальную штангу. Такие устройства относят к типу BMD (Boom Mounted Display — дисплей, закрепленный на штанге). Они весьма дороги и применяются в составе профессиональных тренажеров-симуляторов.
Громоздкость двухэкранных устройств была преодолена путем использования компактных ЖК-экранов. Появились и непрерывно совершенствуются удобные устройства отображения в виде шлемов, биноклей или специальных очков. Их принято называть устройствами типа HMD (Head Mounted Display — дисплей, закрепленный на голове). Именно они являются в настоящее время основными устройствами формирования объёмных изображений и широко используются в системах виртуальной реальности. Наиболее распространенным устройством отображения типа HMD является шлем виртуальной реальности, или VR-шлем. Термин «виртуальная реальность» может быть переведен как воображаемый, кажущийся, даже «поддельный» мир.
Существует также группа устройств типа HHD (Hand Held Display — дисплей, удерживаемый в руках). Типичным представителем устройств типа HHD являются подключаемые к PC бинокли, в которые вмонтированы две ЖК-матрицы. Бинокли имеют значительно меньший вес и габариты по сравнению с устройствами типа BMD, поэтому они находят все более широкое применение в сфере мультимедиа.
Одноэкранные устройства обеспечивают показ частей трехмерного изображения на одном экране. Однако при этом используется специальное оборудование для разделения (селекции) изображений, составляющих стереопару. Существует несколько способов селекции.
• Одновременный (метод поляризационной селекции). На один экран одновременно проецируются два изображения, образующие стереопару, причем каждое изображение имеет различную поляризацию световой волны. В поляризационные очки наблюдатель может видеть стереоскопическое изображение. Такой способ применяется в стереокино, а также в мультимедийных 3D-проекто-рах. В последнем случае одновременно используются два проекционных аппарата, изображения от которых должны быть тщательно совмещены на экране.
• Последовательный (затворный метод). Элементы стереопары отображаются на экране монитора по очереди, при этом между каждым глазом и экраном располагается специальное устройство в виде «шторки», или «затвора» (shutter), которое синхронно со сменой элементов стереопары становится непрозрачным, перекрывая поле зрения одному глазу. Наиболее часто в качестве таких «шторок» используются специальные электронно-управляемые очки (Shutterglasses — очки затворного типа). В качестве управляющего сигнала для таких очков, называемых также активными поляризационными очками, используется выходной сигнал видеоадаптера PC.
• Комбинированный метод. Отличается от затворного метода тем, что позволяет использовать простые (пассивные) поляризационные очки вместо более дорогих активных.
4.3.1. Шлемы виртуальной реальности (VR-шлемы)
Шлемы виртуальной реальности (VR-шлемы), называемые также кибершлемами, являются в настоящее время наиболее совершенными устройствами формирования трехмерных изображений. Помимо наличия двух индивидуальных экранов для каждого глаза VR-шлемы, благодаря своей конструкции, обеспечивают отсечение поля периферийного зрения человека, что усиливает эффект проникновения в виртуальный компьютерный мир.
В VR-шлемах используются миниатюрные экраны, выполненные на основе активных ЖК-матриц. Каждая из ЖК-матриц формирует цветное изображение, которое, благодаря особой конструкции шлема, видит только один глаз. Помимо экранов VR-шлем снабжен стереофоническими головными телефонами и микрофоном. Узел шлема, объединяющий в себе эти матрицы и органы регулировки, называют визором. Визор дает возможность регулировать расстояние между матрицами по горизонтали, которое должно соответствовать расстоянию между зрачками пользователя, называемому IPD (Inter Pupil Distance). Визоры некоторых моделей шлемов оборудованы специальной оптической системой автоматического определения IPD, исключающей необходимость в индивидуальной настройке шлема.
Основным недостатком VR-шлема является недостаточно высокое разрешение стереоскопического изображения. Это обусловлено ограниченным количеством элементов ЖК-матрицы и малым расстоянием между глазом и визором, что делает зернистость ЖК-матриц заметной.
Важнейшей особенностью VR-шлемов является наличие так называемой системы виртуальной ориентации (СВО) (Virtual Orientation System — VOS),которая отслеживает движение головы и в соответствии с ним корректирует изображение на экранах. В случае поворота головы в одну сторону панорамное изображение «прокручивается» через ЖК-матрицы в противоположном направлении. В результате у пользователя возникает иллюзия стабильности наблюдаемой картины, ощущение реальности изображения. В зависимости от принципа действия и типа используемого Поля различают магнитные, ультразвуковые и инерциальные СВО.
Магнитные СВО распространены наиболее широко. В них используются миниатюрные магнитные датчики (катушки индуктивности). Магнитная СВО включает в себя блок внешних неподвижных передатчиков, выполняющих роль радиомаяков; датчик-приемник, расположенный на шлеме; системный электронный блок, который формирует электрические сигналы, поступающие на передатчик, и обрабатывает сигналы, принятые приемником. Интенсивность и фаза принятых сигналов зависят от расстояния между передающими и приемными катушками, а также от их взаимной ориентации. Обрабатывая передаваемые и принимаемые сигналы, системный электронный блок вычисляет пространственные координаты приемника относительно передатчика. Результаты вычислений передаются в PC через стандартный последовательный интерфейс RS-232 с частотой 50‑60 Гц.
В ультразвуковых СВО вместо магнитных используются малогабаритные пьезокерамические преобразователи, выполняющие функции передатчиков и приемников. Обычно используются три передатчика и приемника, размещенные в шлеме. Системный блок посылает на передатчики электрический сигнал и регистрирует ультразвуковой сигнал. Измеряя временную задержку между посланным и принятым сигналом, а также зная скорость распространения звуковой волны (около 330 м/с), можно достаточно точно определить расстояние между передатчиком и приемником. Путем обработки результатов измерений расстояния между тремя парами датчиков рассчитывают положение и ориентацию шлема (головы пользователя) в пространстве.
Инерциальные СВО используются в VR-шлемах моделей, предназначенных в основном для профессионального применения. Свое название они получили благодаря использованию в них инерциальных датчиков — гироскопов и акселерометров, не требующих для своей работы магнитных или ультразвуковых полей. С их помощью создается независимая инерциальная система координат, в которой отслеживается положение головы пользователя.
В качестве входного сигнала для VR-шлема может использоваться либо видеосигнал от бытовой видеоаппаратуры, либо RGB-сигнал видеоадаптера ПК. VR-шлемы с визорами, способными обеспечить разрешение не хуже 640×480, обычно рассчитаны на подключение непосредственно к видеоадаптеру ПК.
Помимо визора VR-шлем оборудован высококачественной стереофонической аудиосистемой. Источником звука может быть либо телевизор (видеомагнитофон), либо звуковая карта компьютера.
Модели VR-шлемов крайне разнообразны по техническим решениям и возможностям и по праву считаются продуктами самых высоких компьютерных технологий. На российском рынке известны такие модели, как VFX1 Headgear VR System, VFX3D, семейство шлемов I-Glasses фирмы I/o Display Systems, кибершлем V8 фирмы Virtual Research Systems. Конструкции шлемов постоянно совершенствуются: если первый из названных имел массу 1,3 кг, то последний — 821 г.
Шлемы виртуальной реальности в настоящее время являются наиболее удачными из всех устройств, основанных на использовании особенностей бинокулярного зрения. Однако качество изображения, получаемого с их помощью, недостаточно высокое вследствие низкого разрешения. В связи с этим перспективы VR-шлемов неразрывно связаны с созданием новых ЖК‑матриц.
4.3.2. 3D-очки
3D-очки являются наиболее распространенными и доступными по цене устройствами формирования трехмерных изображений. Принцип их действия основан на использовании затворного метода разделения элементов стереопары. 3D-очки используются в качестве дополнения к обычному монитору и могут подсоединяться к видеоадаптеру ПК при помощи гибкого провода длиной 2-3 м.
Принцип действия 3D-очков заключается в том, что при последовательном отображении на мониторе левой и правой частей стереопары синхронно меняется прозрачность стекол очков. В результате каждый глаз видит только свою часть стереопары, что обеспечивает стереоэффект. Чтобы стекла 3D-очков могли «терять прозрачность» по командам компьютера, их выполняют по технологии ЖК-ячейки просветного типа, использующей эффект поляризации. Поэтому 3D-очки иногда называют поляризационными. Поскольку прозрачность стекол 3D-очков изменяется синхронно со сменой изображения на экране вследствие управления сигналами видеоадаптера, их называют активными.
Таким образом, термины «активные поляризационные очки», «3D-очки» — синонимы; они обозначают устройства, работающие на одинаковом принципе.
Между 3D-очками и шлемами виртуальной реальности есть принципиальные различия:
3D-очки изображения не создают, хотя также содержат ЖК-линзы, которые используются в качестве электронно-управляемого фильтра (затвора), поэтому качество формируемого изображения определяется монитором;
3D-очки лишены системы виртуальной ориентации, поэтому изображение на экране монитора никак не корректируется в зависимости от положения головы наблюдателя. В связи с этим при Использовании 3D-очков нет смысла перекрывать зону периферийного зрения, поэтому они выполняются в форме обычных очков.
Подключение 3D-очков к ПК производится в большинстве случаев с помощью дополнительного устройства — контроллера, который формирует синхросигнал для 3D-очков, управляющий поочередным затемнением стекол, и преобразует (при необходимости) выходной видеосигнал и синхросигналы видеоадаптера таким образом, чтобы обеспечить раздельный последовательный показ элементов стереопары на экране монитора.
В большинстве моделей 3D-o4kob контроллер выполняется в виде отдельного внешнего блока, хотя в настоящее время появилось много видеоадаптеров с интегрированными контроллерами для 3D-очков.
Современный рынок 3D-очков достаточно разнообразен. Преимущественно используются беспроводные модели, обеспечивающие связь с ПК с помощью инфракрасного передатчика, аналогичного телевизионному пульту управления.
4.3.3. 3D-мониторы
Одним из направлений получения стереоскопического изображения является использование 3D-мониторов. Существуют устройства двух типов, которые можно отнести к категории 3D-монито-ров:
· плоскопанельные 3D-мониторы на основе ЖК-экранов;
· мониторы на основе ЭЛТ, оборудованные поляризационным ЖК-фильтром.
Плоскопанельные 3D-мониторы основаны на свойстве избирательности ЖК-мониторов по отношению к поляризации проходящего излучения. Стереопара в таких мониторах создается за счет того, что ЖК-ячейки нечетных строк экрана пропускают свет с одной поляризацией, например, с горизонтальной, а ячейки четных строк — с вертикальной. Нечетные строки растра используются для отображения левой части стереопары, а четные — правой. Наблюдение стереоэффекта производится с помощью пассивных поляризационных очков. Примером устройства, основанного на этом свойстве, служит 3D-экран ПК типа Notebook Cyberbook.
Для работы с плоскопанельным.и мониторами другого типа 3D-очки не требуются. Принцип действия этого монитора основан на использовании двух разработок фирмы Sony: так называемого двойного расщепителя изображения и специальной фотодиодной системы слежения за положением головы пользователя. Расщепитель изображения состоит из двух прозрачных пластин, между которыми размещен ЖК-экран, как это показано на рис. 4.11. Благодаря этому изображение на ЖК-экране может быть видно только под определенным углом. На экране одновременно отображаются оба элемента стереопары, причем пластины преломляют свет таким образом, что каждый глаз видит только один из элементов стереопары. Чтобы исключить нарушение стереоэффекта, который зависит от угла зрения, при изменении положения головы пользователя, применяется специальная система слежения за положением, в которой в качестве датчиков используется линейка фотодиодов, расположенная над основным экраном. Эта система формирует электрический сигнал, связанный с изменением угла зрения пользователя, под действием которого изменяется коэффициент преломления панелей, обеспечивая устойчивый стереоэффект. Такой принцип действия заложен в основу 15-дюймового 3D-экрана ЖК-монитора фирмы Sony. Оптимальное расстояние до экрана составляет около 60 см, а максимальное разрешение — 1024×768.

| Рис. 4.11. Схема получения стереоизображения в плоскопанельном 3D-мониторе с «расщепителем» изображения |
Мониторы с поляризационным фильтром обеспечивают формирование трехмерного изображения с помощью обычного монитора на основе ЭЛТ, оборудованного специальным внешним электронно-управляемым поляризационным фильтром, например, Monitor Zscreen 2000 производства фирмы StereoGraphics. Этот фильтр используется вместе с пассивными поляризационными очками. Фильтром управляют сигналы специального контроллера, подключаемого к выходу видеоадаптера, подобно контроллеру 3D-очков. Однако, в отличие от активных очков, у фильтра изменяется не прозрачность, а направление поляризации проходящей через него световой волны.
Контроллер управляет фильтром таким образом, что нечетные Кадры оказываются поляризованными в одном направлении, а четные — в другом. В свою очередь, одно стекло пассивных очков пропускает свет с одним направлением поляризации, а другое —с другим. В результате один глаз видит только одну часть стереопары, а второй — только вторую.
Таким образом, в фильтре реализован такой же, как и в активных 3D‑очках, затворный метод разделения элементов стереопары. Достоинством данного устройства, по сравнению с активными 3D-очками, является возможность использования легких и удобных пассивных очков.
Мониторы с поляризационными фильтрами выпускаются в 17-и 21-дюймовом исполнении. К числу их недостатков следует отнести ограничение на частоту кадров, наличие ореолов на контурах объектов, приводящих к взаимным искажениям, а также прозрачность около 32 %, что значительно снижает яркость изображения.
4.3.4. 3D-проекторы
3D-проекторы предназначены для коллективного просмотра объемных изображений в больших аудиториях. Главными отличиями 3D-проекторов от мультимедийных являются сложная конструкция оптической системы и наличие специальных поляризационных фильтров (встроенных или внешних), при помощи которых производится селекция элементов стереопары.

| Рис. 4.12. Конструкция 3D-проектора на основе ЭЛТ |
Люминофор экрана светится очень ярко, поэтому для предотвращения перегрева экран ЭЛТ охлаждают с помощью специальной жидкости, находящейся между экраном ЭЛТ и линзой объектива. Специальные регулировочные винты служат для ручной юстировки объектива. Примером такого устройства является проектор BARCOGRAPHICS 1209s фирмы BARCO. Проектор способен отображать видеосигнал от различных источников: от видеомагнитофона формата VHS до профессиональных графических станций, работающих с разрешением 2500×2000. Высокое разрешение проецируемого изображения связано с отсутствием зернистости люминофора, поскольку в монохромных ЭЛТ, которыми оснащен проектор, используется сплошное люминофорное покрытие.
Для создания стереоэффекта при проецировании изображения необходимо обеспечить раздельное наблюдение элементов стереопары левым и правым глазом. Для этого используются один или два проектора и поляризационные очки (активные или пассивные) для каждого зрителя. В зависимости от используемой комбинации такого оборудования различают четыре схемы получения стереоскопической проекции.
Активная схема предполагает использование одного проектора на основе ЭЛТ, выполняющего последовательный показ элементов стереопары, в то время как зрители пользуются беспроводными активными поляризационными очками затворного типа.
Пассивная схема 1 строится с помощью одного проектора на основе ЭЛТ с внешним электронно-управляемым поляризационным затвором, последовательно показывающим элементы стереопары с различной поляризацией. Зрители используют пассивные поляризационные очки.
Пассивная схема 2 предполагает использование двух проекторов на основе ЭЛТ, выполняющих одновременный показ элементов стереопары. Каждый проектор оборудован внешним пассивным поляризатором, обеспечивающим различную поляризацию элементов стереопары, а зрители пользуются пассивными очками.
Пассивная схема 3 основана на использовании двух ЖК-проекторов, обеспечивающих одновременный показ элементов стереопары. Зрители пользуются пассивными очками.
4.4. Видеоадаптеры
Видеоадаптер (видеокарта) является компонентом видеосистемы ПК, выполняющим преобразование цифрового сигнала, циркулирующего внутри ПК, в аналоговые электрические сигналы, подаваемые на монитор. По существу, видеоадаптер выполняет роль интерфейса между компьютером и устройством отображения информации (монитором).
По мере развития ПК видеоадаптеры стали реализовывать аппаратное ускорение 2D- и 3D-графики, обработку видеосигналов, прием телевизионных сигналов и многое другое. Современный видеоадаптер, называемый Super VGA (Super Video Graphics Adapter), или SVGA, представляет собой универсальное графическое устройство.
Видеоадаптер определяет следующие характеристики видеосистемы:
максимальное разрешение и максимальное количество отображаемых оттенков цветов;
скорости обработки и передачи видеоинформации, определяющие производительность видеосистемы и ПК в целом.
Кроме того, в функцию видеоадаптера включается формирование сигналов горизонтальной и вертикальной синхронизации, используемых при формировании растра на экране монитора.
Принцип действия видеоадаптера состоит в следующем.
Процессор формирует цифровое изображение в виде матрицы N×M n‑разрядных чисел и записывает его в видеопамять. Участок видеопамяти, отведенный для хранения цифрового образа текущего изображения (кадра), называется кадровым буфером, или фрейм-буфером.
Видеоадаптер последовательно считывает (сканирует) содержимое ячеек кадрового буфера и формирует на выходе видеосигнал, уровень которого в каждый момент времени пропорционален значению, хранящемуся в отдельной ячейке. Сканирование видеопамяти осуществляется синхронно с перемещением электронного луча по экрану ЭЛТ. В результате яркость каждого пикселя на экране монитора пропорциональна содержимому соответствующей ячейки памяти видеоадаптера.
По окончании просмотра ячеек, соответствующих одной строке растра, видеоадаптер формирует импульсы строчной синхронизации, инициирующие обратный ход луча по горизонтали, а по окончании сканирования кадрового буфера формирует сигнал, вызывающий движение луча снизу вверх. Таким образом, частоты строчной и кадровой развертки монитора определяются скоростью сканирования содержимого видеопамяти, т.е. видеоадаптером.
4.4.1. Режимы работы видеоадаптера
Режимы работы видеоадаптера, или видеорежимы, представляют собой совокупность параметров, обеспечиваемых видеоадаптером: разрешение, цветовая палитра, частоты строчной и кадровой развертки, способ адресации участков экрана и др.
Все видеорежимы делятся на графические и текстовые. Причем в различных режимах видеоадаптера используются разные механизмы формирования видеосигнала, а монитор в обоих режимах работает одинаково.
Графический режим является основным режимом работы видеосистемы современного ПК, например под управлением Windows. В графическом режиме на экран монитора можно вывести текст, рисунок, фотографию, анимацию или видеосюжет. В графическом режиме в каждой ячейке кадрового буфера (матрицы N×M n-разрядных чисел) содержится код цвета соответствующего пикселя экрана. Разрешение экрана при этом также равно N×M . Адресуемым элементом экрана является минимальный элемент изображения — пиксель. По этой причине графический режим называют также режимом АРА (All Point Addressable — все точки адресуемы). Иногда число n называют глубиной цвета. При этом количество одновременно отображаемых цветов равно 2n, а размер кадрового буфера, необходимый для хранения цветного изображения с разрешением N×M и глубиной цвета п, составляет N×M бит.
В текстовом (символьном) режиме, как и в графическом, изображение на экране монитора представляет собой множество пикселей и характеризуется разрешением N×M . Однако все пиксели разбиты на группы, называемые знакоместами, или символьными позициями (Character boxes — символьные ячейки), размером р×q. В каждом из знакомест может быть отображен один из 256 символов. Таким образом, на экране умещается M/q= Mt символьных строк по N/p- Nt символов в каждой. Типичным текстовым режимом является режим 80×25 символов.

| Рис. 4.13. Схема представления символа «А» в текстовом режиме в матрице 8x8 и ячейке знакогенератора |
Совокупность изображений 256 символов называется шрифтом. Аппаратный знакогенератор хранит шрифт, который автоматически используется видеоадаптером сразу же после включения компьютера (обычно это буквы английского алфавита и набор специальных символов). Адресом ячейки знакогенератора является порядковый номер символа.
Для кодирования изображения символа на экране используются два байта: один — для задания номера символа, второй — для указания атрибутов символа (цвета символа и фона, подчеркивания, мигания, отображения курсора). Если на экране имеется N×М знакомест, то объем видеопамяти, необходимый для хранения изображения, составит Nt×Мt×2 байт. Эту область видеопамяти называют видеостраницей. Видеостраница является аналогом кадрового буфера в графическом режиме, но имеет значительно меньший объем. В наиболее распространенном текстовом режиме (80×25 символов) размер видеостраницы составляет 4000 байт, в режиме 40×25 — 2000 байт. На практике для удобства адресации под видеостраницу отводят 4 Кбайт = 4096 байт и 2 Кбайт = 2048 байт соответственно, при этом «лишние» байты (96 и 48) не используются.
Главная особенность текстового режима в том, что адресуемым элементом экрана является не пиксель, а знакоместо. Иными словами, в текстовом режиме нельзя сформировать произвольное изображение в любом месте экрана — можно лишь отобразить символы из заданного набора, причем только в отведенных символьных позициях.
Другим существенным ограничением текстового режима является узкая цветовая палитра — в данном режиме может быть отображено не более 16 цветов.
Таким образом, в текстовом режиме предоставляется значительно меньше возможностей для отображения информации, чем в графическом. Однако важное преимущество текстового режима — значительно меньшие затраты ресурсов ПК на его реализацию.
Переход к более высокому разрешению и большей глубине цвета привел к увеличению загрузки центрального процессора и шины ввода/вывода. В целях разгрузки центрального процессора решение отдельных задач построения изображения было возложено на специализированный набор микросхем (Chipset) видеоадаптера, называемый графическим ускорителем, или акселератором. Акселератор аппаратным путем выполняет ряд действий, направленных на построение изображения.
4.4.2. 2D- и 3D-акселераторы
2D-акселератор — графический ускоритель для обработки двухмерных графических данных (2D), реализует аппаратное ускорение таких функций, как прорисовка графических примитивов, перенос блоков изображения, масштабирование, работа с окнами, мышью, преобразование цветового пространства. Первоначально видеоадаптеры с аппаратным ускорением графических функций делились на две группы: видеоадаптеры с графическим ускорителем (акселератором) и видеоадаптеры с графическим сопроцессором.
Графический акселератор — устройство, выполняющее заданные логические или арифметические операции по жесткому алгоритму, который не может быть изменен.
Графический сопроцессор — более универсальное устройство и работает параллельно с центральным процессором. Основное отличие графического сопроцессора от графического акселератора в том, что сопроцессор можно запрограммировать на выполнение различных задач, поскольку он является активным устройством: имеет возможность, как и центральный процессор, обращаться к системной оперативной памяти и управлять шиной ввода/вывода.
В современных видеоадаптерах объем и сложность графических функций, выполняемых графическим сопроцессором, стали соизмеримы с объемом задач, решаемых центральным процессором ПК. В связи с этим Chipset, составляющий основу современного видеоадаптера с аппаратной поддержкой графических функций, называют графическим процессором.
3D-акселераторы предназначены для обеспечения возможности видеть на экране проекцию виртуального (не существующего реально) динамического трехмерного объекта, например, в компьютерных играх. Такой объект необходимо сконструировать, смоделировать его объемное изображение, т.е. задать математическую модель объекта (каждую точку его поверхности) в трехмерной системе координат, аналитически рассчитать всевозможные зрительные эффекты (угол падения света, тени и т.п.), а затем спроецировать трехмерный объект на плоский экран. 3D-акселератор необходим только в том случае, когда объемное изображение синтезируется компьютером, т.е. создается программно.
Совокупность приложений и задач, в рамках которых реализуется эта схема построения трехмерного изображения на экране монитора PC, называется трехмерной графикой, или 3D (3-Dimentional — трехмерный).
4.4.3. Синтез трехмерного изображения. 3D-конвейер
Синтез 3D-изображения выполняется путем аналитического расчета различных параметров изображения для создания визуальных эффектов, обеспечивающих ощущение его объемности и реальности. В частности, в процессе синтеза 3D-изображения выполняются:
• оценка расстояния до предмета путем анализа информации о его размерах (чем меньше объект — тем он дальше);
• оценка последовательности наложения предметов один на другой (кто выше — тот ближе);
• определение глубины пространства за счет использования эффекта перспективы, т. е. визуального сближения параллельных линий, уходящих вдаль;
• анализ световых эффектов на предмете (теней, бликов и т.п.).
| Рис. 4.14. Каркасная модель тора, заданного координатами центра 0 (х, у, z), внутренним радиусом R1, и радиусом сечения R2 |
 Для получения этих эффектов процесс синтеза трехмерного изображения объекта в виде его двухмерной проекции на экране монитора строится по модели, называемой 3D-конвейером. Выделяют следующие основные этапы 3D-конвейера.
Для получения этих эффектов процесс синтеза трехмерного изображения объекта в виде его двухмерной проекции на экране монитора строится по модели, называемой 3D-конвейером. Выделяют следующие основные этапы 3D-конвейера.
1. Построение геометрической модели поверхности объекта путем задания трехмерных координат его опорных точек и уравнений соединяющих их линий. Полученная геометрическая модель представляет собой так называемую каркасную модель объекта (Wireframe). На рис. 4.14 изображена каркасная модель тора, заданного координатами центра O (х, у, z), внутренним радиусом R1 и радиусом сечения R2.
2. Разбиение поверхности полученного объекта на элементарные плоские элементы (прямоугольники или треугольники) — тесселяция (Tessela-tion), или триангуляция. Это приво дит к тому, что поверхность объекта представляет собой совокупность плоских граней — многоугольников, в частности треугольников, как показано на рис. 4.15. Поверхность объекта воспроизводится точнее при увеличении числа и уменьшении размеров многоугольников (ср. рис. 4.15, а, б).
3. 
| Рис. 4.15. Тесселяция объекта с помощью раатичного числа треугольников: а – 420 треугольников; б – 2668 треугольников |

| Рис. 4.16. Трансформация формы объекта путем изгиба и скручивания |
4. Расчет освещенности (Lighting) и затенения (Shading) объекта производится в два этапа. Сначала выполняется расчет освещенности каждого элементарного многоугольника с учетом его удаленности от источника света и угла падения светового луча. Чтобы поверхность объекта не выглядела состоящей из множества отдельных плоских граней, как это показано на рис. 4.17, а, применяют методы затенения, т.е. дополнительно производят интерполяцию значений освещенности, позволяющую плавно изменять освещенность каждой грани и скрыть резкие переходы между ними (рис. 4.17, б).

| Рис. 4.17. Изображение объекта, рассчитанное: а — без использования механизма интерполяции; б — с использованием метода затенения |
5. Проецирование синтезированного трехмерного объекта на плоскость экрана, т. е. первое, предварительное преобразование трехмерного объекта в совокупность двухмерных. При этом в Z-буфере сохраняется совокупность данных о расстоянии каждой из вершин элементарного многоугольника, образующего грани, до плоскости проецирования. Это позволяет в дальнейшем определить, какие части объекта окажутся видимыми, а какие — нет. Наличие Z-буфера — важнейшее отличие работы с трехмерной графикой от работы с двухмерной.
6. Обработка данных о вершинах элементарных многоугольников, полученных на предыдущих этапах (Triangle Setup), заключающаяся в преобразовании формы представления координат вершин: из чисел с плавающей точкой (вещественных чисел) в целые числа, а также в сортировке вершин и других действиях.
7. Удаление скрытых поверхностей — HSR (Hidden Surface Removal), т.е. исключение из проецирования тех элементов поверхности объекта, которые оказываются невидимыми с точки наблюдения.
8. Закраска элементарных треугольников, или текстурирование, выполняется наложением текстур (Texture Mapping). Текстура (Texture) — это элемент обшивки объекта, т.е. изображение участка его поверхности, которое хранится в виде квадратной растровой картинки, состоящей из текселов (Texel — Texture Element — элемент текстуры). После наложения текстуры (рис. 4.18, а) каркасная модель как бы покрывается своеобразным покрытием — текстурой и становится похожей на реальный объект (рис. 4.18, б)-В процессе текстурирования каждый многоугольник, составлявший каркасную модель, заменяется на элемент текстуры, а значение каждого пикселя двухмерного изображения вычисляется по значению соответствующего тексела текстуры.
При текстурировании производится обработка растровой графики, что приводит к необходимости применять различные приемы коррекции изображения, например применение текстур с различным разрешением — мипмэппинг.

| Рис. 4.18. Текстурированис объекта: а — текстура; б — каркасная модель после наложения текстуры |
| Рис. 4.19. Пример МIP-каскада |
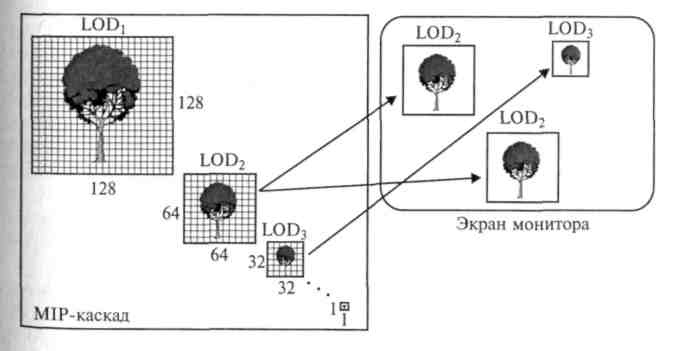 MIP-текстурирование, или мипмэппинг (MIP— Multum In Рсчуо — много в одном), применяется для устранения пикселизации при приближении к ЗО-объекту. MIP-текстурирование заключается в том, что в памяти акселератора хранятся несколько копий одной и той же текстуры, но с различным разрешением LOD {Level Of Detalization — уровень детализации). Каждая последующая копия текстуры содержит в четыре раза больше пикселов, чем предыдущая. Совокупность всех копий одной и той же текстуры называют MIP-каскадом, пример которого дан на рис. 4.19. В процессе «прорисовки» ближних к наблюдателю поверхностей используются более крупные текстуры, а при прорисовке дальних — более мелкие. Применение мипмэппинга требует значительных объемов памяти акселератора. Для хранения текстуры не в локальной памяти ЗО-акселератора, а в RAM PC и при необходимости быстро их подгружать используется локальная шина AGP с высокой пропускной способностью.
MIP-текстурирование, или мипмэппинг (MIP— Multum In Рсчуо — много в одном), применяется для устранения пикселизации при приближении к ЗО-объекту. MIP-текстурирование заключается в том, что в памяти акселератора хранятся несколько копий одной и той же текстуры, но с различным разрешением LOD {Level Of Detalization — уровень детализации). Каждая последующая копия текстуры содержит в четыре раза больше пикселов, чем предыдущая. Совокупность всех копий одной и той же текстуры называют MIP-каскадом, пример которого дан на рис. 4.19. В процессе «прорисовки» ближних к наблюдателю поверхностей используются более крупные текстуры, а при прорисовке дальних — более мелкие. Применение мипмэппинга требует значительных объемов памяти акселератора. Для хранения текстуры не в локальной памяти ЗО-акселератора, а в RAM PC и при необходимости быстро их подгружать используется локальная шина AGP с высокой пропускной способностью.
9. Моделирование эффектов прозрачности и полупрозрачности заключается в том, что на основе информации о взаимной про зрачности объектов и среды выполняется коррекция цвета пиксе лов — так называемое альфа-смешение (Alpha-blending)и затуманивание (Fogging).
10. Коррекция дефектов изображения путем сглаживания — ан- тиалиасинг (Anti-aliasing). Антиалиасинг применяется для устране ния дефектов изображения типа «лестничного» эффекта на наклонных линиях, муара. Различают краевой (Edge Anti-aliasing) и полный (Full-screen Anti-aliasing — FSAA) антиалиасинг. В первых моделях игровых ускорителей использовался только краевой антиалиасинг, для современных 3D‑акселераторов обязательным является полный антиалиасинг.
Краевой антиалиасинг заключается в усреднении цвета пикселов на краях (ребрах) грани на основе взвешенного суммирования цветов прилегающих граней. Техника взвешенного суммирования заключается в определении весовых коэффициентов, с которыми суммируются цвета при определении цвета краевого пикселя. При этом полагают, что каждая точка (линия) на краю грани имеет фиксированную, ненулевую площадь, а значения весовых коэффициентов зависят от того, какую часть этой площади перекрывают прилегающие грани. На рис. 4.20 дана иллюстрация техники взвешенного суммирования.

| Рис. 4.20. Техника взвешенного суммирования, используемая при краевом антиалиасинге |
Полный антиалиасинг, или субпиксельный антиалиасинг, используется для полного устранения всех дефектов. Суть данного метода в том, что коррекция дефектов выполняется с так называемым виртуальным разрешением, которое выше исходного. При этом каждый пиксель представляется состоящим из нескольких виртуальных субпикселей, над которыми производится антиалиасинг, как показано на рис. 4.21. После коррекции, когда цвета всех субпикселей определены, исходное разрешение восстанавливается.

| Рис. 4.21. «Виртуальное разрешение» при выполнении полного антиалиасинга |
11.используется в том случае, когда в текущем видеорежиме 3D-акселератора для кодирования цвета пикселя используется менее 24 бит (например, в режиме High Color при 16-битном цвете).
12.Окончательное формирование кадрового буфера (Frame Buffer) — области памяти 3D‑акселератора, в которую помещается спроецированное двухмерное изображение. Кадровый буфер используется для формирования выходного, аналогового видеосигнала 3D‑ускорителя.
Для ускорения процесса создания изображения используется механизм двойной буферизации, при котором выделяется память одновременно для двух смежных кадров: построение следующего кадра начинается еще до того, как закончится отображение предыдущего. В результате обеспечивается более плавная смена кадров.
13.Постобработка (Post-processing)применяется в том случае, когда требуется реализовать какие-либо двухмерные эффекты над подготовленным кадром как единым целым.
Этапы 1—6 3D‑конвейера образуют его геометрическую стадию, на которой выполняются интенсивные тригонометрические вычисления с помощью CPU. Однако существует тенденция обеспечения современных игровых 3D‑акселераторов специальным процессором, обеспечивающим аппаратное ускорение выполнения геометрической стадии 3D‑конвейера.
Этапы 7—13 3D‑конвейера образуют стадию прорисовки объекта, или стадию рендеринга (Rendering — изображение, рисование, визуализация). На этой стадии все действия выполняются уже с растровыми объектами, состоящими из отдельных, дискретных элементов — пикселей и текселов. Выполняемые на стадии рендеринга операции не характерны для центрального процессора (как на геометрической стадии), поэтому именно на этом этапе конвейера необходимо аппаратное ускорение. Большинство современных 3D‑ускорителей предназначено для рендеринга на аппаратном уровне и различается лишь числом реализуемых функций.
Программным интерфейсом для 3D‑акселераторов служит так Называемый интерфейс прикладного программирования (Application Program Interface — API). API занимает промежуточное положение Между высокоуровневыми прикладными программами и низкоуровневыми командами различных 3D‑акселераторов и обеспечивает эффективное преобразование запросов прикладной программы в оптимизированную последовательность низкоуровневых команд. Благодаря API, разработчики прикладных программ избавлены от необходимости работать с низкоуровневыми командами акселератора.
В настоящее время существуют несколько платформ API, отличающихся областями применения.
DirectX разработана фирмой Microsoft, используется в игровых приложениях, работающих под управлением операционной системы Windows 95/98, и включает в себя несколько узконаправленных API:
DirectDraw обеспечивает использование аппаратных средств ускорения обычной, двухмерной графики;
Direct3D отвечает за работу графической системы в режиме создания трехмерных изображений;
DirectInput обеспечивает аппаратно независимый ввод информации в ПК через клавиатуру, мышь и джойстик;
Direct Play используется при совместной игре на нескольких компьютерах, объединенных в сеть или соединенных непосредственно, через параллельный или последовательный порты;
DirectSound управляет использованием ресурсов звуковой системы ПК.
В архитектуре Direct3D заложен принцип проверки функциональных возможностей установленного аппаратного обеспечения. В соответствии с этим принципом прикладная программа сначала запрашивает Direct3D‑совместимый драйвер об аппаратно поддерживаемых данным акселератором 3D‑функциях, а затем в зависимости от ответа активизирует поддерживаемые функции. Это избавляет от необходимости производить ручную настройку.
DirectX является жестко регламентированным, закрытым стандартом, который не допускает изменений до выхода в свет своей новой версии.
OpenGL используется в основном в профессиональных приложениях (CAD, системы трехмерного моделирования, симуляторы и т.п.), работающих под управлением операционной системы Windows NT. Вместе с тем существуют и игры, ориентированные на OpenGL, например Quake.
API OpenGL построен на основе концепции открытого стандарта, имеющего небольшой базовый набор функций и множество расширений, реализующих более сложные функции. Производитель Chipset карты 3D-акселератора обязан создать BIOS и драйверы, выполняющие базовые функции OpenGL, но не обязан обеспечивать поддержку всех расширений. В результате возникают проблемы, связанные с написанием производителями драйверов для своих изделий, которые поставляются как в полном, так и в усеченном виде.
К числу OpenGL-совместимых драйверов относятся следующие:
ICD (Installable Client Driver — драйвер приложения-клиента) обеспечивает максимальное быстродействие, поскольку содержит низкоуровневые коды, обеспечивающие поддержку не только базового набора функций, но и его расширений.
MCD (Mini Client Driver) содержит оптимизированный код лишь для некоторых этапов ЗО-конвейера, поэтому акселератор под его управлением работает медленнее.
Мини-порт — группа специализированных OpenGL-совместимых драйверов, каждый из которых специально разработан для работы с какой-либо одной программой или игрой. Такой мини-порт применяется, когда, например, возникает необходимость 'поиграть в QuakeGL или Quake II на ПК с Windows 95 и 3D-акселератором, не рассчитанным на использование OpenGL.
Раппер (Wrapper — устройство для оборачивания, завертывания, окутывания) — мини-порт, который может работать как ICD за счет перевода инструкций OpenGL в инструкции Direct3D, обеспечивая при этом самую низкую скорость работы по сравнению с драйверами других типов.
Game Engine — «игровой движок» — драйвер, разработанный для конкретной 3D‑платы и обеспечивающий максимальную производительность за счет непосредственного использования низкоуровневых команд акселератора, без использования API.
Принципиальным отличием API OpenGL от DirectX является то, что OpenGL ориентирован на корректность создаваемых изображений, тогда как для DirectX важны скорость прорисовки и естественность изображения.
Кроме того существуют Native API, создаваемые производителями 3D‑акселераторов исключительно для своих Chipset с целью наиболее эффективного использования их возможностей.
Для настройки видеосистемы с целью обеспечения максимальной производительности при работе с трехмерной графикой пользователь ПК должен:
при выборе 3D‑платы четко представить область ее будущего применения: игры или решение профессиональных задач;
установить в систему требуемый API;
проконтролировать настройку параметров драйвера и/или прикладной программы, задействовав необходимые функции 3D-акселерации;
используя тесты и оценивая качество изображения визуально, подобрать набор функций, обеспечивающих наилучшее качество изображения.
При работе с программами, ориентированными на DirectX, Пользователь не выполняет перечисленные выше настройки, поскольку они производятся автоматически.
4.4.4. Устройство и характеристики видеоадаптера
Первые 3D‑акселераторы выполнялись в виде самостоятельного устройства только для работы с трехмерной графикой, устанавливаемого в слот шины ввода/вывода и соединяемого с видеоадаптером специальным кабелем.
Современные видеоадаптеры содержат один мощный графический процессор, в состав которого входит 3D‑акселератор. В связи с этим понятие «3D‑акселератор» означает не специализированную плату, а универсальный видеоадаптер, в состав которого входит ускоритель трехмерной графики.
Современный видеоадаптер (видеокарта) включает следующие основные элементы:
графический процессор;
модули оперативной памяти;
RAMDAC — цифроаналоговый преобразователь, выполняющий преобразование цифровых сигналов ПК в сигналы, формирующие изображение на мониторе.
Интегральным показателем качества видеоадаптеров, сфера применения которых — в основном трехмерные игры, является частота смены кадров (frame per second — fps). В каждой трехмерной игре этот показатель будет различным.
Качество современного видеоадаптера можно считать удовлетворительным, если в игре Quake при разрешении 1600×1200 он обеспечивает 60 — 70 fps.
Другим показателем качества видеоадаптера является максимальное число обрабатываемых элементарных простых объектов (многоугольников, треугольников) в секунду. Эти значения для отдельных видеоадаптеров составляют 800— 1200 млн/с.
Объем оперативной памяти видеоадаптеров достигает 128 Мбайт. Типы памяти, используемой в видеоадаптерах, аналогичны модификациям обычной оперативной памяти. В недорогих моделях используется память SDRAM или ее более быстрая графическая модификация SGRAM со временем доступа 7 —8 нс. Более совершенные модели оснащены памятью DDR SDRAM со временем доступа 5 — 6 нс.
Частота работы графического чипа и памяти видеоадаптера может быть одинаковой или разной. Например, базовая частота чипа самых популярных видеокарт 2000 г. составляла 166—250 МГц, а частота памяти — 140—180 МГц.
Частота RAMDAC определяет качество видеоадаптера. Большинство современных видеокарт имеют частоту RAMDAC в диапазоне 250-400 МГц.
Тип интерфейса с шиной ввода/вывода оказывает существенное влияние на быстродействие всей видеосистемы. Для эффективной работы с трехмерной графикой современные видеоадаптеры комплектуются интерфейсом AGP. AGP4× — суперскоростной режим, обеспечивающий скорость обмена 1,06 Гбайт/с.
На компьютерном рынке наиболее популярны видеокарты на чипсете собственной оригинальной разработки, предлагаемые фирмами ATI, Matrox и 3dfx, в то время как чипсеты фирмы Nvidia используются в составе видеокарт других производителей. Видеокарты ATI предпочтительнее в мультимедийных комплексах, производства 3dfx — в игровых приложениях, а фирма Matrox специализируется на двухмерной графике.
Для поддержки спецэффектов в игровых приложениях (антиалиасинга, имитации тумана, пламени, ряби на водной глади) в процессор видеоадаптера все чаще встраивают специальный блок «трансформации и освещения» (Т&Т), который позволяет получить высокое качество игрового изображения.
Для приема телевизионных сигналов и вывод их на монитор в плату видеоадаптера встраивают TV-тюнер. Встроенные TV-тюнеры не отличаются высоким качеством изображения, которое может воспроизводиться в небольшом окне Windows. TV-тюнеры, устанавливаемые в отдельный слот компьютера, обеспечивают полноэкранный режим и высокое качество изображения, обеспечивая при этом выполнение дополнительных сервисных функций: телефонные переговоры через Internet, прослушивание радио, прием спутникового телевидения при наличии спутниковой антенны.
Внешние TV-тюнеры, подключаемые через порт USB, обеспечивают воспроизведение телепередач в «оконном» режиме на экране монитора.
4.5. Средства обработки видеосигнала
Источником видеосигнала чаще всего является аналоговое устройство — телевизионный тюнер, видеомагнитофон, видеокамера. Для передачи на компьютер цифрового видео (например, сигнала цифровых видеокамер) используется специальный цифровой порт FireWire. Однако цифровые видеокамеры пока не получили широкого распространения. Поэтому для компьютерной обработки сигналов аналоговых видеоустройств необходимо выполнить их оцифровку, т.е. преобразование из аналоговой в цифровую форму. Для этого нужны карты ввода/вывода, принимающие входящий аналоговый видеосигнал и оцифровывающие его в Реальном времени, затем эти данные необходимо сохранить на Жестком диске. После сохранения оцифрованного изображения Выполняют его редактирование. Эти функции осуществляет устройство захвата видеосигнала.
Устройство захвата видеосигнала — видеобластер (Video Blaster) представляет собой видеоплату, называемую также захватчиком изображений, устройством ввода видео, ТВ-граббером (Grab — захватывать), имидж-кепчерами (Image Capture — захват изображения), и обеспечивает:
прием низкочастотного видеосигнала (от видеокамеры, магнитофона или телевизионного тюнера) на один из программно-выбираемых видеовходов;
отображение принимаемого видео в реальном времени в масштабируемом окне среды Windows (VGA-монитор можно использовать вместо телевизора);
замораживание кадра оцифрованного видео;
сохранение захваченного кадра на винчестере или другом доступном устройстве хранения информации в виде файла в одном из принятых графических стандартов (TIP, TGA, PCX, GIF и др.).
Обобщенная схема устройства такого типа дана на рис. 4.22.

| Рис. 4.22. Обобщенная структурная схема видеобластера |
Видеодекодер обеспечивает прием сигнала с одного из входов, его оцифровку, цифровое декодирование согласн