Устройство
БРМ включает в себя четыре рулевые машины и состоит из следующих основных частей: шпангоута 10 (рис. 16) с осями рулевых машин 4, четырёх плат 9 со струйными реле 7 и блоками цилиндров 20, четырёх потенциометров обратной связи 8, четырёх блоков пружин 16, газовода 19.
Шпангоут 10 является основной силовой деталью БРМ, предназначенной для крепления узлов и деталей, а также для стыковки БРМ с головкой самонаведения и аппаратурным отсеком.
Плата 9 объединяет блок цилиндров 20 с двумя рабочими полостями и патрубки для подвода газа от струйного реле 7.
Блок пружин 16 состоит из двух пружин 11 и 14, закреплённых в корпусе 13, который крепится к шпангоуту 10. Пружины поджаты двумя стаканами 15, установленными на резьбе корпуса.
Блок пружин через ползун 12 и рычаг 3 связан с осью рулевой машины 4, закреплённой в подшипниках 1 и 2.
Газовод 19 представляет собой систему трубопроводов, соединённых переходниками, и предназначен для подвода газа от ПАДа к рулевым машинам. Для очистки газа предназначены четыре металлокерамических фильтра, находящихся в системе газовода.
Оси рулевых машин 4 имеют такую конструкцию, которая позволяет по условиям эксплуатации устанавливать рули на последнем этапе стыковки блока управления с ракетой.
Крутящий момент от рулевой машины передаётся через рычаг 18 к оси руля.
Конструкция БРМ предусматривает возможность проверки функционирования РМ на сжатом воздухе при установленном ПАДе.
Для этой цели воздух подводится через отверстие в газоводе, которое при работе ПАДа заглушено пробкой 17.
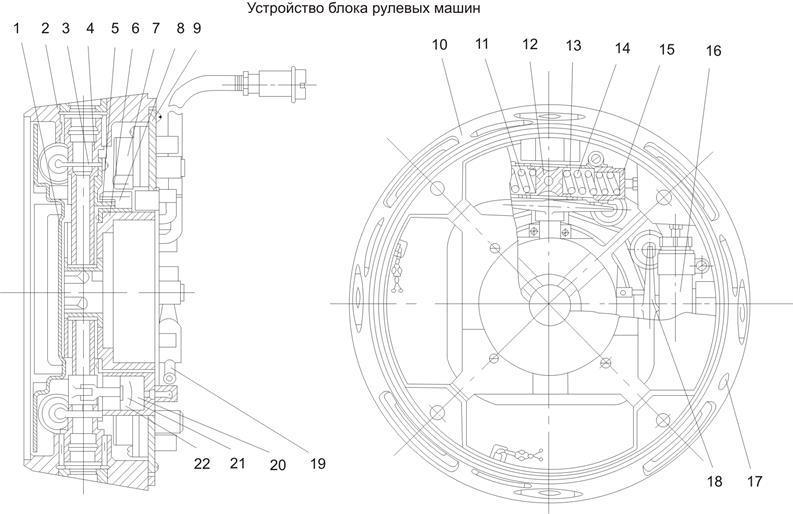
Рис. 161, 2-игольчатые подшипники; 3-рычаг; 4-ось; 5-зубчатый сектор коромысла; 6-шестерня; 7-струйное реле; 8-потенциометр обратной связи; 9-плата; 10-шпангоут; 11-пружина; 12-ползун; 13-корпус; 14-пружина; 15-стакан; 16-блок пружин; 17-пробка; 18-рычаг; 19-газовод; 20-цилиндр; 21-поршень; 22-манжета
Струйное реле 7 представляет собой электромагнитный преобразователь, на вход которого поступают электрические сигналы от контура управления, преобразуемые в механическое перемещение якоря. С осью якоря связана заслонка, движение которой преобразуется в перепад давления газа.
Исполнительный механизм рулевой машины выполнен по коромысловой схеме и включает в себя блок цилиндров 20 и поршневую группу.
Цилиндр образует две рабочие полости рулевой машины. В поршневую группу входят система поршней 21 и уплотнительные манжеты 22.
Поршневая группа через коромысловый рычаг 18 связана с осью рулевой машины 4. Ось каждой рулевой машины соединена с одним рулём.
Потенциометрический датчик обратной связи 8 представляет собой линейный потенциометр с отводом от средней точки, установленный в корпусе из прессматериала.
На внешней стороне оси ползуна закреплена шестерня 6, которая сцепляется с зубчатым сектором коромысла 5. Обмотка и ползун закрыты крышкой. Кронштейн ПОСа прикреплён к шпангоуту винтами.
Блок пружин компенсирует положительный шарнирный момент, создавая постоянный по величине отрицательный момент. В результате суммарный шарнирный момент, являющийся нагрузкой рулевого привода, изменяется в пределах от минус 1 до +0.7 кгм.
Отрицательный по знаку шарнирный момент не представляет опасности для устойчивости привода.