Устройство
БУ представляет собой головку самонаведения 1 и аппаратурный отсек 6, механически состыкованные шпильками 3 через разрезную пружину 2. Электрическая стыковка осуществляется двумя разъёмами Ш2 и Ш3 типа РП-15 и одним разъёмом Ш4 18 типа СР75-107ф.
Разрезная пружина предназначена для уменьшения механических возмущений, воздействующих на ГСН при работе пиротехнических средств и других источников возмущения.
Головка самонаведения 24Н1 является однороторной головкой со стабилизированной в пространстве оптической линией визирования и служит для выдачи электрических сигналов, пропорциональных абсолютной угловой скорости и углам пеленга цели, в контур управления.
Аппаратурный отсек преобразует сигналы ГСН в углы поворота аэродинамических рулей 17. Входящий в АО блок электроники 8 заключён в
кольцевой корпус. На боковой поверхности БЭ расположены гнёзда срезного бортового разъёма 9 и люк контрольных разъёмов 14. На переднем торце размещены штепсельные разъёмы 7 для электрической стыковки всех элементов блока управления.
БУ развязан относительно вращающейся в полёте ракеты С-25-ОФМ и стабилизирован по углу крена для обеспечения работоспособности ГСН 25Н1.
Узел развязки состоит из двух соосных конических втулок: внутренней 1 (рис. 8) – неподвижный конус и внешней 2 – подвижный конус. Втулки соединены между собой шарикоподшипниками. Вершина неподвижного конуса является цапфой, на которой установлен радиально-упорный двусторонний подшипник 3, смонтированный наружным кольцом в переднем шпангоуте 4. С внутренней стоны неподвижный конус имеет упорную резьбу диаметром 95 мм и шагом 5 мм, при помощи которой он закреплён на боевой части 8 ракеты С-25-ОФМ. Внутреннее кольцо шарикоподшипника закреплено на цапфе с зазором и связано с неподвижным конусом через систему пружинных демпферов 11 и 12, предназначенных для снижения импульсных возмущений от двигателя ракеты в момент старта.
На неподвижный конус установлена защёлка 5, стопорящая его. Вершина подвижного конуса имеет цилиндрический выступ для установки переднего шпангоута, которым является корпус блока рулевых машин. В основании корпуса выполнена заточка для осевой установки БЭ и размещения второго шарикоподшипника 6.

Рис. 7 1-ГСН 24Н1; 2-пружина разрезная; 3-шпилька; 4-блок рулевых машин; 5-шпилька; 6-аппаратурный отсек; 7- разъёмы Ш1, Ш2, Ш3; 8-отсек электроники; 9-разъёмы ШЭВ, Ш0; 10-батареи; 11-винт; 12-ДУК; 13-преобразователь; 14-разъёмы ШК1, ШК2, ШК3; 15-инерционный переключатель; 16-ПАД; 17-руль; 18-разъёмы Ш12, Ш13, Ш14.
Узел развязки обеспечивает жёсткое соединение БУ с ракетой С-25-ОФМ в направлениях, перпендикулярных траектории полёта, и свободу вращения относительно общей продольной оси ракеты. Аэродинамические нагрузки воспринимаются подшипниками узла развязки.
К вершине подвижного конуса прикреплён на четырёх шпильках блок рулевых машин 4 (рис. 7), а к фланцу основания на восьми винтах 11-БЭ 8.
В корпусе БРМ имеются каналы, отводящие отработанный газ в атмосферу.
Рули, установленные в осях рулевых машин, фиксируются от выпадения шариком 7 (рис. 9), западающим в канавку оси 2 и поджимаемым винтом 4 с уплотнением 5.
Аэродинамические рули на БУ используются как в управляемом, так и в неуправляемом пуске, причём в неуправляемом пуске аэродинамические рули переключаются во флюгирующий режим для уменьшения рассеивания ракеты.
Аэродинамический руль установлен и зафиксирован на эксцентриковой оси 2.
В канале основания эксцентриковой оси размещены электровоспламенитель 17 и поршень 16 с ограничителем хода 15, а в соосном канале руля размещён ригель 14 и стопор 11. Ригель установлен в соосных каналах основания оси 2 и руля 1 и законтрен по кольцевой проточке калиброванным срезным штифтом 13, поджимаемым гайкой 12.
В хвостовой части ригеля выполнен самоконтрящийся клин, взаимодействующий со стопором 11, установленном нормально к поверхности клина и законтренным гайкой 10. Доступ к соосным каналам закрыт вкладышем 3, закреплённым винтом 8.
При отказе системы наведения или отсутствия сигнала захвата с ГСН на электровоспламенители 17 рулей с боевой кнопки самолёта поступает сигнал разарретирования. Давлением пороховых газов от срабатывания электровоспламенителя разгоняется поршень 16, ударяющий по ригелю 14. При этом срезается штифт 13 и ригель перемещается назад, заклиниваясь своим
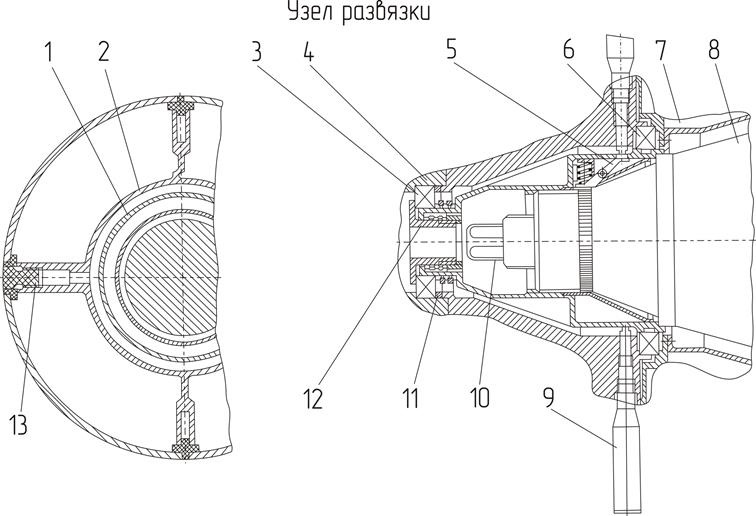
Рис. 8 1-внутренняя втулка; 2-внешняя втулка; 3-радиально-упорный подшипник; 4-передний шпангоут; 5-защёлка; 6-шарико-подшипник радиальный; 7-блок электроники; 8-боевая часть; 9-рукоятка; 10-кожух датчиков ВУ; 11-пружинный демпфер наружный; 12-пружинный демпфер внутренний; 13-пробка.
К взаимно перпендикулярным рёбрам подвижного конуса крепятся кронштейн с четырьмя батареями Т-454 10. На фланец в основании конуса закреплены пороховой аккумулятор давления 16 и свободный гироскоп 12 (ДУК).
Система разводки газа в блоке рулевых машин состыкована с ПАДом гладким штуцером с резиновыми уплотнениями.
хвостовиком в торцевой плоскости стопора 11.
Аэродинамический руль получает возможность свободно вращаться относительно эксцентриковой оси 2 и принимать положение, соответствующее набегающему потоку.
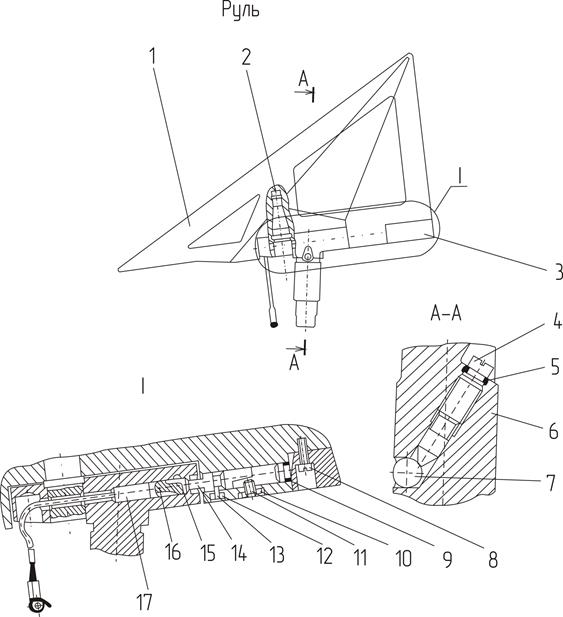
Рис. 9 1-плоскость руля; 2-эксцентриковая ось; 3-вкладыш; 4-винт; 5- уплотнение; 6-основание; 7-шарик; 8-винт; 9-кольцо; 10-гайка; 11-стопор; 12-гайка; 13-штифт; 14-ригель; 15-ограничитель хода; 16-поршень; 17-электровоспламенитель.