Способы позиционирования
Дальности до спутников в процессе позиционирования измеряют двумя методами — кодовым и фазовым. Дальномерный код должен иметь значительную продолжительность и случайное (псевдослучайное) распределение 0 и 1. В этом случае два идентичных кода коррелируют лишь тогда, когда они совмещены друг с дру i ом. Коды генерируют синхронно на спутнике и в приемнике. Принятый в приемнике код спутника запаздывает по отношению к местному на время, пропорциональное пройденному им расстоянию. Поэтому пришедший и местный коды не коррелируют. Время распространения сигнала, а следовательно, и дальность от приемника до спутника, определяют задержкой местного кода до обнаружения сильной его корреляции с принятым со спутника.
Фазовым методом выполняют наиболее точные измерения, используя для этого несущие волны. Фазовый метод измерения расстояний основан на том, что фаза синусоидального колебания изменяется пропорционально времени. Поэтому фаза принятого со спутника сигнала в приемнике отличается от фазы сигнала, выработанного в приемнике, на величину, пропорциональную расстоянию между приемником и спутником. При фазовом методе измерений возникает сложная проблема разрешения неоднозначности. На пути от спутника к приемнику изменению расстояния в одну длину волны соответствует изменение фазы волны в один цикл (период). Поэтому результат измерения разности фаз пришедшего и местного колебаний должен был бы состоять из некоторого целого числа циклов и дробной их части. В действительности же измерениями фиксируется только дробная часть. Это означает, что при длине волны 19 см расстояние, каким бы оно ни было большим, фиксируется только в пределах этого отрезка. Учитывая высоту полета спутников, нетрудно подсчитать, что в измеряемой линии должно укладываться более 100 000 000 таких отрезков, но точное их число — неизвестно. Задача не имеет однозначного решения, и нужны дополнительные усилия для ее разрешения.
Координаты при спутниковом позиционировании определяются в двух режимах: автономном и дифференциальном.
Автономный режим предполагает, что наблюдатель работает с одним приемником и определяет свое местонахождение независимо от каких-либо других измерений. Местоположение определяется пространственной линейной засечкой. Дальности измеряются кодовым методом. Геометрическая сущность засечки заключается в следующем. Если с некоторого определяемого пункта измерить дальности до трех спутников и из них, как из центров, построить этими радиусами три сферы, то они пересекутся в искомой точке (рис. 3.3).
Таким образом, для определения трех координат (X, Y, Z) надо располагать тремя сферами. Это трехмерный случай местоопределения (3D). Однако в пространственной линейной засечке одна из сфер может быть земная. Тогда будут определены только две координаты — широта и долгота на земной сфере, проходящей через пункт наблюдения. Это двумерный случай местоопределения (2D).
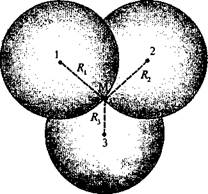
Рис. 3.3. Пространственная засечка — три сферы с радиусами Л,, R2, R} пересекаются в определяемой точке М
Практически измеряют не дальности, а искаженные значения их — псевдодальности. Псевдодальность отличается от истинной дальности на величину, пропорциональную расхождению шкал времени на спутнике и в приемнике. Если отсчеты по всем каналам приемника, принимающим сигналы от разных спутников, производятся одновременно, то отличия псевдодальности от дальности до любого спутника одинаковы. Это отличие может быть исключено после введения его в качестве дополнительного неизвестного в уравнения местоопределения.
Поэтому, чтобы правильно вычислить координаты пункта по псевдодальностям, в случае 2D надо измерять их до трех спутников с известными координатами, а в случае 3D — по крайней мере, до четырех. Несмотря на то что спутники перемещаются с огромной скоростью, их координаты в каждое мгновение должны быть известны с высокой точностью и переданы в приемную аппаратуру пользователя. Как уже отмечалось, информация о координатах спутников содержится в навигационных сообщениях.
Способ автономного позиционирования прост, однако чувствителен ко всем источникам погрешностей. На точность влияют нестабильность частот и сдвиги шкал времени на спутниках и в приемниках, погрешности в координатах спутников, аппаратурные погрешности приемников, задержки сигналов в ионосфере, тропосфере. Чтобы ослабить влияние атмосферы, сигналы спутников принимают лишь тогда, когда они не ниже 10° над горизонтом. Точность измерений снижается еще из-за того, что в приемник приходят волны не только непосредственно от спутника, но и пе PL-отраженные от земной поверхности и вблизи расположенных строений.
Точность определения координат оценивается средней квадратической погрешностью ~ 7 м; предельная погрешность в 2—3 раза Польше — около ±15-20 м. Точность автономного способа повышают продолжительными (до 10—15 минут) наблюдениями и совместной обработкой всех результатов измерений.
Дифференциальный режим, в отличие от автономного, требует, чтобы измерения выполнялись кодовым методом одновременно двумя приемниками. Один приемник ставят на станции — пункте с известными координатами. Эту станцию называют базовой, референц-станцией или контрольно-корректирующей станцией. Другой приемник — подвижный — размещают на определяемой точке. Поскольку координаты референц-станции известны, их можно использовать для сравнения со вновь определяемыми координатами и находить на этой основе поправки для подвижной станции. Задержки в приемнике исключаются таким же путем, как и в автономном режиме, — по наблюдениям четырех и более спутников.
Точность дифференциального режима при кодовом методе измерения дальностей зависит от типа приемника, программного обеспечения и колеблется от нескольких дециметров до нескольких метров. Дифференциальные коррекции применяют и к фазовым измерениям, при этом точность повышается до уровня 1—5 см.
В мире существует множество базовых станций, которые передают дифференциальные поправки в стандартном международном формате RTCM SC-104. Организованы службы, передающие поправки через спутники связи и Интернет.
Важным показателем качества местоопределения является геометрический фактор (ГФ). Он характеризует потери точности, обусловленные геометрией взаимного расположения спутников и приемника. Координаты определяются с наибольшей точностью, когда спутники равномерно распределены на небосводе. Точность ухудшается в десятки и сотни раз, если спутники приближаются к одной плоскости.
Точное определение пространственного вектора, т.е. приращений координат между двумя пунктами, может выполняться двумя способами:
♦ статическим позиционированием;
♦ кинематическим позиционированием.
При этом в качестве основного применяются фазовый, а в качестве вспомогательного — кодовый методы измерения дальностей. Способы статического позиционирования используются принаиболее точных работах, например для развития геодезических сетей. Известно несколько разновидностей этих способов: статика, быстрая статика и способ реокупации. В способе статики антенны приемников устанавливают на двух пунктах, между которыми должны быть определены приращения координат. С этих пунктов фазовым и кодовым методами измеряют псевдодальности до четырех или большего числа спутников. Измеренная часть фазовой псевдодальности непригодна для непосредственного использования, так как она искажена многими погрешностями. Источники погрешностей те же, что и при автономном позиционировании. В ходе обработки по специальным программам, когда используются и фазовые, и кодовые измерения, исключают погрешности, восстанавливают неизвестные целые числа фазовых циклов и определяют разности координат между пунктами, на которых установлены приемники.
Точность статики зависит от продолжительности измерений. Измерения в течение 5-10 минут обеспечивают дециметровую точность. Обычно в статике продолжительность наблюдений на паре станций составляет 1 час и более. За это время происходит накопление измерений, выполняемых через интервалы от 1 секунды до 5 минут. Точность определения плановых координат повышается до нескольких см. Высоты определяются менее точно, примерно в два раза.
Разновидностями статики являются:
♦ быстрая статика, когда применяют ускоренные стратегии обработки данных, а продолжительность измерений уменьшают за счет увеличения числа наблюдаемых спутников;
♦ способ реокупации, когда непрерывность измерений сохраняется только на базовой станции, а на подвижной станции измерения выполняют лишь в начале и конце часового интервала.
Нетрудно представить сеть пунктов, между которыми определены приращения координат. Зная точные координаты хотя бы одного пункта этой сети, можно вычислить координаты всех остальных пунктов.
Способ кинематического позиционирования представляет собой определение пространственного вектора от приемника базовой станции до мобильного приемника. Предварительно определяют координаты базового и подвижного приемников способом статики, а также другими способами, или приемники устанавливают на пунктах, координаты которых известны с точностью до нескольких сантиметров. Это необходимо для разрешения неодно значности — определения числа фазовых циклов. После этого приемник перемещают на следующий пункт и определяют приращения координат между ним и базовой станцией. Зная координаты базовой станции, вычисляют координаты этого пункта и т.д. Измерения ведут непрерывно и обязательно по одним и тем же спутникам. В целях контроля кинематический ход замыкают на исходном пункте или на пунктах с известными координатами. Точность кинематического позиционирования несколько ниже, чем в статике.
Различают несколько разновидностей кинематики: способ «непрерывной кинематики» позволяет «цифровать» контуры на местности путем перемещения приемника, который через заданные интервалы времени фиксирует свои координаты; способ «стой-иди» предусматривает возможность остановиться на точке, выполнить более длительные измерения, а затем продолжить движение.
В упомянутых способах полевые наблюдения и обработка раз-делены во времени.
Способ «кинематики реального времени» {RTK — Real Time Kinematic) применяют тогда, когда имеется цифровой радиоканал и данные с базового приемника можно передать на подвижный. Этим способом при топографической съемке можно определить координаты и высоты пикетов с точностью 2—3 см. Для съемки участков, где спутниковые методы неэффективны, используется электронный тахеометр, совмещенный со спутниковым приемником.