Двигатель постоянного тока (ДПТ)
Устройство:
1. Статор (индуктор).
2. Ротор (якорь).
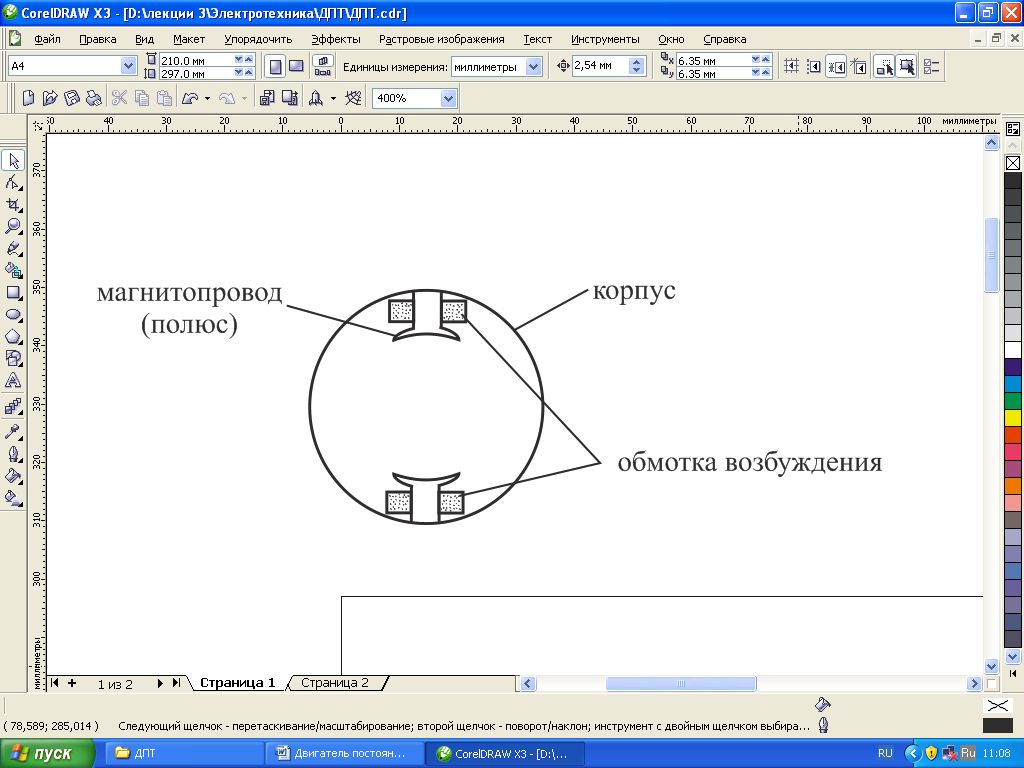
В статор входит: корпус, магнитопровод в виде полюсов, на которых расположена обмотка возбуждения.
Индуктором называют ту часть машины, которая предназначена для создания магнитного поля.
В ротор входит: вал, магнитопровод, в пазах которого расположена обмотка, и коллектор со щетками.
Условное обозначение:

Схемы ДПТ с различными типами возбуждения:

Принцип работы:
UВ → IВ → Ф;
UЯ → IЯ,
где IВ — ток возбуждения; IЯ — ток якоря.
Взаимодействие тока якоря с магнитным потоком Ф статора создает вращающий момент:
 ,
,
где СМ — конструктивный коэффициент.
Под действием М ротор начинает вращаться, пересекая при этом силовые линии магнитного поля, вследствие чего в нем индуктируется ЭДС, которую называют ЭДС вращения:
 .
.
Основные уравнения ДПТ:
Ими являются уравнения электрического равновесия ротора:
 ;
;
 .
.
где  — падение напряжения в цепи якоря; — ЭДС вращения.
— падение напряжения в цепи якоря; — ЭДС вращения.
Из этой формулы получаем практически важное соотношение:
 .
.
Подставим вместо
 .
.
И получим:
 .
.
По этому выражению можно построить механическую характеристику ДПТ n = f(M), задаваясь нагрузкой, т. е. М, можно найти соответствующую ей частоту вращения. Если при этом U = Uном, Ф = Фном имеем естественную механическую характеристику.
Механическая характеристика ДПТ:

Точка «1» — холостой ход; координаты М = 0, n = n0;
«2» — номинальный режим; координаты Мн, nн;
«3» — предельно-допустимая кратковременная нагрузка.
Участок 1–2 — допустимая длительная работа.
Участок 2–3 — допустимая только кратковременная работа.
Обычно Iя доп =(2 ÷ 2,5)Iя ном.
Регулирование скорости ДПТ:
 ,
,
где  — сопротивление якорной цепи.
— сопротивление якорной цепи.
Откуда вытекает возможность регулирования скорости тремя способами:  ,
,  , .
, .
1. Рассмотрим искусственные механические характеристики при регулировании скорости, изменением подводимого  .
.
Очевидно, что по условиям эксплуатации двигателя возможно изменение только в сторону уменьшения  , а, следовательно, скорость двигателя можно регулировать только вниз, при этом скорость холостого хода (точка «1») снижается.
, а, следовательно, скорость двигателя можно регулировать только вниз, при этом скорость холостого хода (точка «1») снижается.
Характеристики примут вид:
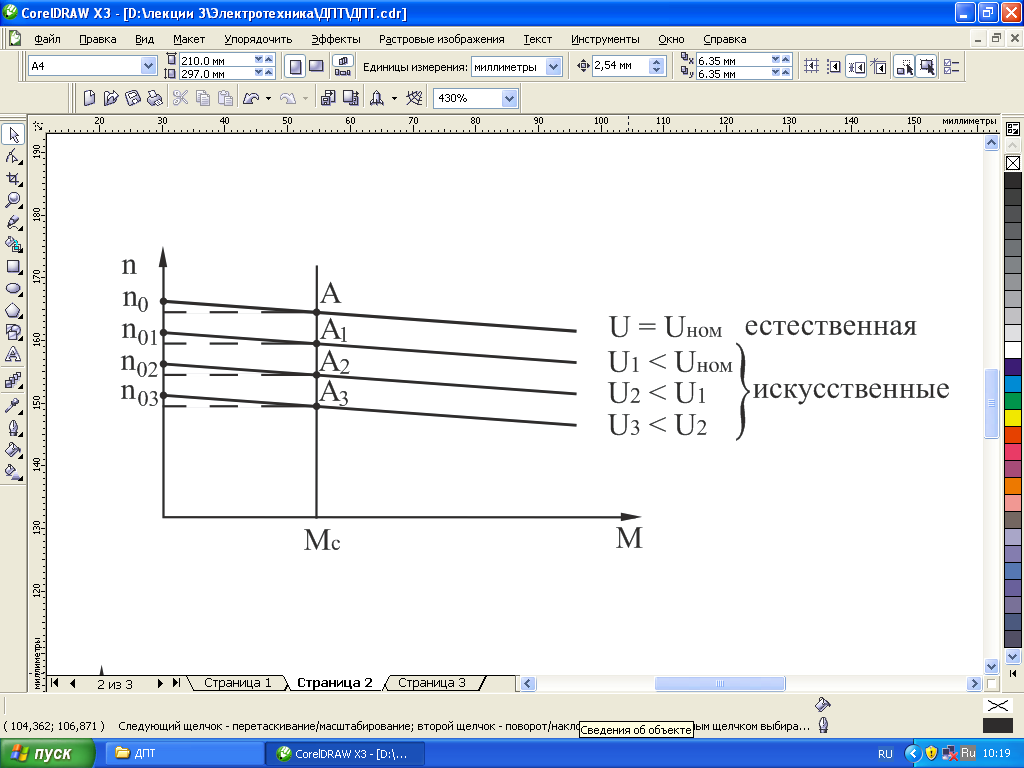
Если нагрузка на двигателе представлена характеристикой МС, то изменяя напряжение от до  можно получить различные частоты вращения от nА до nА3.
можно получить различные частоты вращения от nА до nА3.
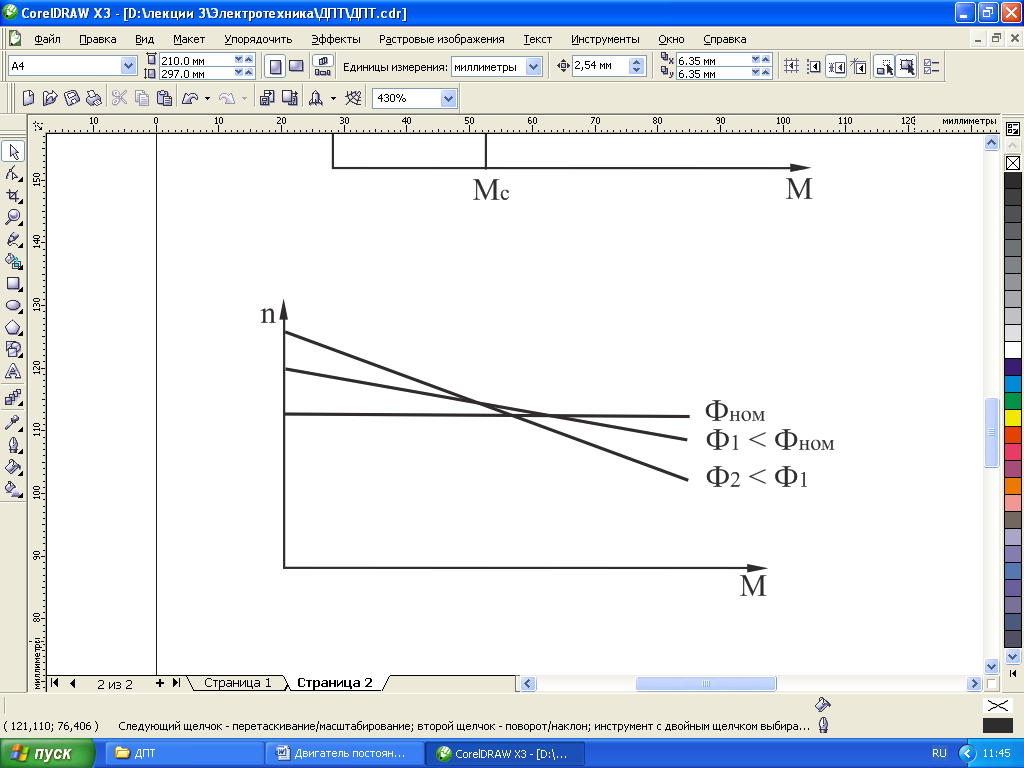
2. Регулирование скорости путем изменения величины магнитного потока.
Величину магнитного потока можно изменять с помощью тока IВ, например реостатом, только в сторону уменьшения. Уменьшение магнитного потока приведут к увеличению скорости. Таким образом посредством магнитного потока можно регулировать скорость только вверх.

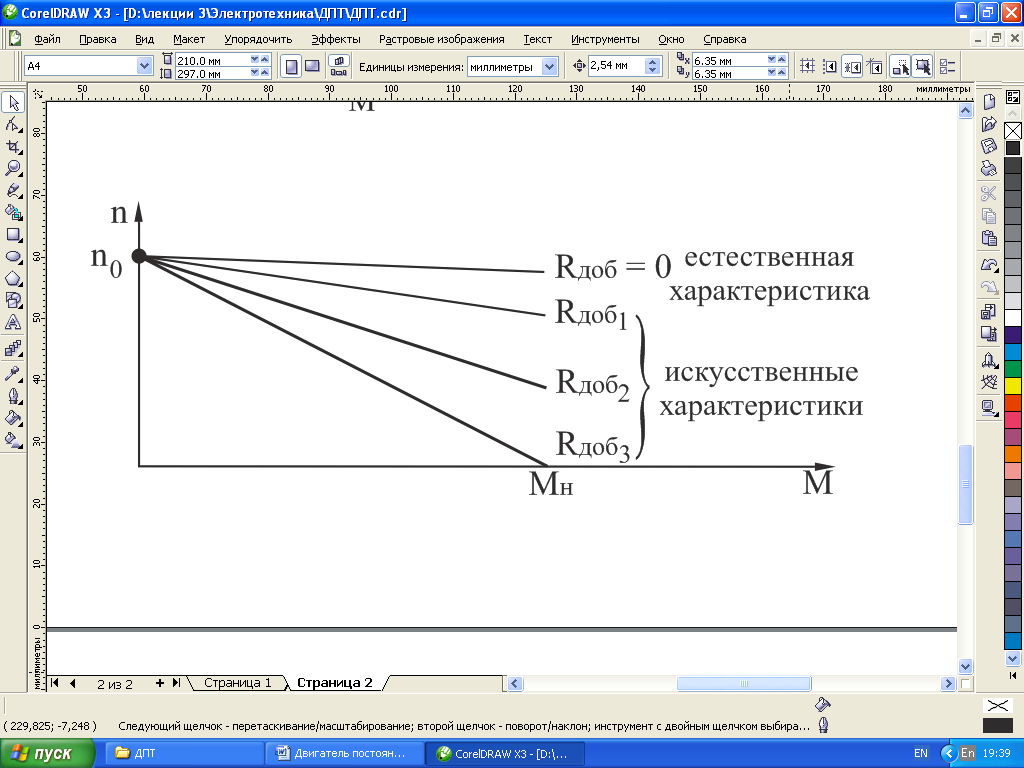
3. Рассмотрим механические характеристики при регулировании скорости, изменением сопротивления якорной цепи.

 ,
,
 не зависит от Rп, следовательно искусственные характеристики имеют общую точку .
не зависит от Rп, следовательно искусственные характеристики имеют общую точку .
Ток при пуске когда n = 0 и E = 0 имеет вид  и достигает недопустимо больших значений, что не позволяет запустить двигатель. Для уменьшения пусковых токов вводят в цепь якоря добавочное сопротивление
и достигает недопустимо больших значений, что не позволяет запустить двигатель. Для уменьшения пусковых токов вводят в цепь якоря добавочное сопротивление  :
:
 .
.
Ток уменьшается и характеристика имеет вид: