Математическая модель объекта проектирования
Тема. Многокритериальные задачи оптимизации
Общие сведения о многокритериальных задачах оптимизации
До сих пор мы рассматривали задачи оптимизации, где ясен критерий (показатель эффективности) по которому проводится оценка эффективности проектируемого объекта, т.е. требуется обратить в min (max) один единственный показатель. К сожалению, такие задачи на практике встречаются редко. Когда идёт речь о проектировании таких объектов как самолёт, технологический процесс, то их эффективность, как правило, не может быть полностью оценена с помощью единственного показателя. Приходится рассматривать дополнительные критерии (показатели эффективности). Чем больше критериев качества вводится в рассмотрение, тем более полную характеристику достоинств и недостатков проектируемого объекта можно получить. Таким образом, задачи проектирования сложных систем всегда многокритериальны, так как при выборе наилучшего варианта приходится учитывать много различных требований, предъявленных к системе (объекту). Например, при проектировании самолёта учитывают следующие показатели: скорость, радиус действия, боевой потолок, полезная нагрузка.
Впервые проблема многокритериальной оптимизации возникла у итальянского экономиста В. Парето при математическом исследовании товарного объёма. В дальнейшем интерес к проблеме векторной оптимизации усилился в связи с разработкой и широким использованием вычислительной техники в работах всё тех же экономистов-математиков. И уже позднее стало ясно, что многокритериальные задачи возникают не только в экономике, но и в технике: например, при проектировании технических систем, при оптимальном проектировании интегральных схем, в военном деле и т.д.
Прежде чем сформулировать задачу векторной оптимизации (ЗВО) введём и рассмотрим некоторые понятия.
Математическая модель объекта проектирования
При решении задач следует основное внимание обратить на предварительный этап – составление математической модели (ММ) и на заключительном этапе – всесторонний анализ полученного оптимального решения.
Составление математической модели начинается с выбора переменных, совокупность числовых значений, которых однозначно определяет один из вариантов процесса. После выбора переменных необходимо по тексту задачи составить ограничения, которым эти переменные должны удовлетворять. При этом нужно следить, чтобы в модель были включены все ограничения, а в то же время не было ни одного лишнего или записанного в более жесткой, чем требуется условиями задачи, форме.
Наконец, составляется целевая функция (функции), которая в математической форме отражает критерий (критерии) выбора лучшего варианта. После составления математической модели необходимо рассмотреть возможные пути её упрощения и выбрать подходящий вычислительный метод для решения задачи.
Опр. 1. Приближённое описание объекта, выраженное с помощью математической символики, называют математической моделью.
Математические модели могут быть функциональными, если они отображают физические или информационные процессы, протекающие в моделируемом объекте, и структурными, если они отображают только структурные (например, геометрические свойства объектов. Функциональные модели чаще всего представляют собой системы уравнений, а структурные модели — это графы, матрицы.
Опр.2. В математической модели объектов проектирования обычно выделяют свойства систем, элементов систем и внешней среды, в которой должен действовать объект. Количественные представления этих свойств называют параметрами, т.е. фигурирующие в математической модели объектов проектирования величины называют параметрами. Параметр – это величина, характеризующая свойства или режим его функционирования
Различают выходные параметры как величины, характеризующие свойства системы, внешние параметры как величины, характеризующие свойства внешней среды, внутренние параметры как величины, характеризующие свойства элементов системы.
Опр. 3. Параметры элементов объекта называют внутренними параметрами, величины. Следовательно, внутренние параметры характеризуют свойства элементов проектируемого объекта (проектные параметры).
Опр.4. Те внутренние параметры, которые являются независимыми друг от друга и могут изменяться в некоторых пределах, называются управляемыми параметрами (независимыми).
Опр.5. Параметры, характеризующие свойства объекта, называют выходными параметрами.
Опр.6. Параметры, характеризующие свойства внешней по отношению к рассматриваемому объекту среды, называют внешними параметрами.
Например, для блока электронно-вычислительной аппаратуры (ЭВА) выходными параметрами будут быстродействие, объём внутренней памяти; внутренними параметрами могут быть параметры транзисторов, ёмкости конденсаторов, тепловые характеристики элементов; внешними параметрами будут радиационное излучение, температура окружающей среды, давление, влажность, напряжение источников питания и т.п.
Функционирование любой проектируемой технической системы подчиняется определённым физическим законам. Закон функционирования технической системы описывается аналитическим выражением между входными, внутренними и выходными переменными системы. Эти переменные связаны определёнными соотношениями с переменными проектирования X, под которыми понимаются внутренние переменные, допускающие варьирование (изменение). В процессе определения наилучших значений параметров (параметрического синтеза) изменение переменных X ведёт к изменению выходных параметров Y системы.
Введём обозначения
X=(x1, x2, . . . , xn) – вектор управляемых параметров;
Y=(y1, y2, . . . , ym) – вектор выходных параметров;
Q=(q1, q2, …,ql) – вектор внешних параметров;
т.к. Y есть функция от X и Q, то в явном виде она имеет следующий вид
Y=F(X, Q) – аналитическая модель объекта (1)
Следовательно, y1=F1(X,Q), y2=F2(X, Q), . . . , ym=Fm(X,Q).
Опр. 7. Если математическое описание проектируемого объекта не содержит элементов случайности, то математическая модель называется детерминированной.
Опр. 8. Математические модели, в которых учитываются случайные факторы, называются вероятностными (стохастическими).
Таким образом, выражение "задана математическая модель" означает, что имеются формулы (или готовые программы (алгоритмы)), позволяющие по заданному набору (x1, x2, . . . , xn) вычислить любые интересующие нас характеристики системы (y1, y2, . . . , ym).
Опр. 9. Пространством параметров называется n – мерное пространство, состоящее из точек с декартовыми координатами (x1, x2, . . . , xn). Обычно X входит в дифференциальные или другие уравнения, описывающие функционирование системы.
В общем случае, для того чтобы создать хорошую машину, необходимо учитывать ограничения – параметрические и функциональные.
Проектировщики могут указать разумные пределы изменения каждого из внутренних параметров, которые мы будем называть параметрическими
 (2)
(2)
Кроме параметрических ограничений в условие задачи включают функциональные ограничения, которые мы будем записывать в следующем виде
hk(X)=0, k=1,2, . . . , K; ограничения равенства (3)
gj(X)³0, j= 1,2, . . . , J. ограничения неравенства (4)
Ограничения – зависимости между проектируемыми параметрами, которые должны учитывать при отыскании решения.
Очевидно, ограничения (2) выделяют в n – мерном пространстве параметров параллелепипед П. Ограничения (3) и (4) выделяют в параллелепипеде П некоторое подмножество D. Динамика определение допустимого множества решений и критериального пространства показана на рис. 1. Рассмотрен двумерный случай.
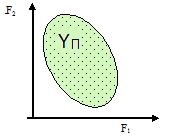
Рис 1. а. Область работоспособности, Критериальное пространство YП
заданная параметрическими ограничениями
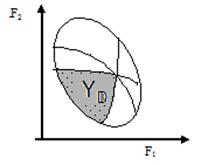

Рис. 1. б. Область работоспособности D Критериальное пространство YD
Опр. 10. Множество D – допустимая область (область работоспособности) – это множество векторов X, для которых одновременно выполняются условия (2), (3) и (4).
Отметим, что условия работоспособности важны при проектировании, т.к. задача проектирования формулируется следующим образом:
Разработать объект, в котором наилучшим образом выполняются условия работоспособности во всём диапазоне изменения внешних параметров и при выполнении всех качественных требований технического задания.
Опр. 11. Множество D называют множеством решений (альтернатив, вариантов, планов, стратегий).
Определение множества D – одна из первостепенных проблем оптимального проектирования. Кто поручится, что даже талантливый и опытный конструктор при малом числе вариантов, не имея этого множества, сможет найти оптимальное решение? А ведь речь идёт о современных машинах, приборах и конструкциях, которые тиражируются миллионами штук. Следовательно, чтобы создать конкурентоспособные машины, необходимо уметь строить допустимое множество вариантов проекта. В этом множестве имеется подмножество неулучшаемых или так называемых парето-оптимальных решений, т.е. таких, которые нельзя одновременно улучшить по всем оптимизируемым критериям качества не ухудшив при этом значения хотя бы одного из этих критериев. Очевидно, вариант проекта, по которому будет изготавливаться серийная машина, обязательно должен быть парето-оптимальным.
Отметим также, что если система ограничений несовместима, то область допустимых решений является пустой. Одной из причин получения пустого множества D завышенные требования заказчика к проектируемому объекту. В этом случае нужно потребовать от заказчика "уступок" при назначении технических заданий и ограничений.
Замечание. Некоторые авторы разделяют ограничения на выходные параметры, т.е. рассматривают ограничения на выходные параметры, не входящие в критерий оптимальности (функциональные ограничения) и ограничения на выходные параметры, вошедшие в критерий оптимальности. Разница между критериальными и функциональными ограничениями состоит в том, что функциональные ограничения – ограничения нормативного вида, и нарушать которые чаще всего нельзя (например, допустимые напряжения в элементах конструкции, ток или напряжение в сети, ширина колеи подвижного состава и т.п.), а ограничения критериальные не являются жесткими, они зависят от физического смысла критерия, конъюнктурных и других соображений.
Пример ограничений в других областях. Утилизация автомобилей. "Ограничений только три: нужно, чтобы автомобиль был в собственности не менее года, кроме того, не удастся спихнуть битые или аварийные авто. И последнее – субсидию можно потратить только на новую машину, выпущенную в России". [Статья "Кто снимет сливки", АН, №192, четверг 21 января 2010 года]
В многокритериальных задачах оптимизации (МЗО) сравнение решений осуществляется при помощи задания на множестве управляемых параметров функций y1=F1(X), y2=F2(X), . . . , ym=Fm(X), называемых критериями. Показатель качества принято называть критерием оптимальности.
Опр. 12. Критерием называется характеристика системы (объекта) заданная функцией f(X), которая связана с её качеством монотонной зависимостью и обладает тем свойством, что если альтернатива X1 предпочтительнее альтернативы X2, то f(X1)<f(X2) и обратно.
Стремление оперирующей стороны к достижению цели описывается стремлением к увеличению (уменьшению) функций F1(X), F2(X), . . . , Fm(X), называемых критериями эффективности.
Встречаются также названия: показатели качества, эффективности, критериальные функции, функции предпочтения, функция полезности, целевые функции, частные критерии или локальные критерии.
Если оптимизация ведётся без учёта статистического разброса характеристик, то соответствующий критерий оптимальности называют детерминированным критерием, если разброс параметров учитывается, то имеем критерий статистический. Статистические критерии оптимальности более полно отражают представление о качестве объектов проектирования, однако их использование, как правило, при автоматизированном проектировании ведёт к значительному увеличению затрат машинного времени [Корячко В.П. и др. Теоретические основы САПР: Учебник для вузов/В.П. Корячко, В.М. Курейчик, И.П. Норенков. – М.: Энергоатомиздат, 1987. – 400 с.: ил.].