Принцип работы РСБН в режиме «Посадка»
При дальности до радиомаяка меньше (37+.3) км, высоте полета меньше 1,2 км и входе в "коридор" + 1,5 км от оси ВПП аппаратура автоматически переходит в режим посадки. В этом режиме радиотехническая аппаратура РСБН-6С, работавшая по сигналам радионавигационного маяка, переключается на работу с посадочными маяками системы ПРМГ-4. Система ПРМГ-4 состоит из КРМ, ГРМ (рабочий и резервный комплект) и РД.
Система РСБН в режиме посадки служит целям формирования на борту самолёта сигналов отклонения от заданного курса посадки и заданной глиссады планирования, а также позволяет получать информацию о текущей дальности самолёта до точки приземления. В САУ выдаются отклонения от равносигнальных зон курса посадки и глиссады планирования, обеспечивающие снижение самолета до высоты 60 м.
В режиме посадки на приборах индицируется:
ППД-2 - дальность до начала ВПП,
НПП - отклонения от равносигнальных зон курса и глиссады, заданный курс, равный курсу посадки на ВПП, курсовой угол радиомаяка, азимут самолета, определяемый путем счисления по сигналам воздушной скорости и истинного курса.
В этот режим аппаратура переходит по сигналу 27 В "Посадка", который выдается из блока БВП при автоматическом включении режима посадки или из блока ЩУ при включении тумблера ПОСАДКА на блоке ЩУ. Сигнал "Посадка" поступает в АФС для включения передней антенны самолета, в блок ЩПК для включения запрограммированных кодов и кварцев посадки (при автоматическом включении режима посадки) и в приемник СПАД-2И для перевода его на прием сигналов посадочных радиомаяков. В блоке БСиО по сигналам из приемника СПАД-2И формируются сигналы отклонения от равносигнальных зон курса и глиссады, и сигналы готовности курсового и глиссадного каналов 27 В "Готовн. К", 27 В "Готовн. Г", которые выдаются в САУ.
При наличии сигнала "Готовн. К" заданный курс, выдаваемый из блока ВВП, равен курсу посадки ВПП. При включении тумблера "+ 180°" на блоке ЩУ в блок ВВП поступает сигнал "+180°" (27 В), по которому запрограммированный курс посадки ВПП изменяется на 180°.
В режиме посадки сигнал "Возврат рад." формируется при наличии следующих сигналов: "Возврат", "Д<250 км" и "Готовн. К".
В этом режиме прекращается измерение азимута по сигналам радиомаяка, дальность измеряется по сигналам посадочного ретранслятора. Азимут счисляется автономными средствами, на основе V (см. рис. 22*).
При необходимости выполнить повторный заход на посадку из САУ в блок БВП выдается сигнал 27 В "Повт. заход", для этого на пульте летчика нажимается кнопка ПОВТОРНЫЙ ЗАХОД. Положение переключателя ПОВТ. ЗАХОД на блоке ЩУ определяет сторону выполнения повторного захода.
Предпосадочный маневр состоит из прямолинейного участка и разворота с выходом на посадочный курс (см. рис.13*).
Выход на посадочный курс осуществляется на высоте и удалении от ВПП, обеспечивающих ввод самолета в зону действия посадочных маяков. Если дальность до радиомаяка меньше 37+3 км, а высота полета меньше 1,2 км при боковом удалении от оси ВПП, не превышающем 1,5 км, аппаратура автоматически переходит в режим посадки.
При уменьшении бокового отклонения от оси ВПП до 1,5 км и высоте полета меньше 1,2 км автоматически включается режим "Посадка". По сигналу "Посадка" аппаратура переходит на прием сигналов посадочных радиомаяков, прекращается измерение азимута по сигналам навигационного маяка, дальность на приборе ППД-2 скачком уменьшится на значение, равное расстоянию от ретранслятора дальности до радиомаяка, так как в режиме посадки дальность измеряется по сигналам посадочного радиомаяка, находящегося в начале ВПП.
При устойчивом приеме сигналов курсового радиомаяка закрывается курсовой бленкер на НПП, образуя сплошное черное поле, на пульте САУ загорается лампа ПОСАДКА, а на НПП выдается заданный курс, равный курсу посадки аэродрома.
При приеме сигналов глиссадного радиомаяка закрывается глиссадный бленкер НПП, образуя сплошное черное поле. На планки положения НПП выдаются сигналы отклонения от равносигнальных зон курса посадки и глиссады снижения. По этим сигналам производится заход на посадку до высоты 60 м. Отклонение курсовой планки НПП влево от центрального кружка означает, что равносигнальная зона курсового маяка находится влево от самолета. Отклонение глиссадной планки вверх означает, что равносигнальная зона глиссады находится выше самолета. Для посадки по линиям глиссады и курса планки положения НПП должны удерживаться в центре кружка.
При включении кнопки ПОВТОРНЫЙ ЗАХОД на пульте летчика система обеспечивает автоматическое выполнение повторного захода на посадку левым или правым кругом в зависимости от положения переключателя ПОВТ. ЗАХ. на щитке ЩУ.
При невозможности посадки с первого захода выполняется повторный заход. Режим повторного захода на посадку включается двойным нажатием кнопки ПОВТОРНЫЙ ЗАХОД в системе самолетного оборудования. Первым нажатием снимается режим посадки, на пульте САУ должна погаснуть лампа ПОСАДКА. После этого самолет вручную выводится на высоту 630 м. Второе нажатие кнопки ПОВТОРНЫЙ ЗАХОД производится после загорания лампы КОРР. на ЩУ.
ЗАКЛЮЧЕНИЕ
Навигационный комплекс главное средство вождения ЛА на воздушных трассах. Поэтому автоматическое решение задач выполняемых им сокращает время загруженности экипажа управляющими действиями до 40% от общей продолжительности полёта. Состав НК зависит от класса ЛА, уровня автоматизации комплекса и имеющихся датчиков навигационной информации. Уровень автоматизации определяется степенью совершенства вычислительной системы комплекса. Для повышения надёжности комплекса используется резервирование систем и аппаратуры.
ПРИЛОЖЕНИЕ
Рис.1 Комплект навигационного комплекса КН-23:
1 – комплект РСБН-6С; 2 – комплект ИКВ-1; 3 – ДИСС-7; 4 – В144;. 5 – ДВС-10;
6 - ДВ-30К
 Рис. 2 Ортодромическая система координат
Рис. 2 Ортодромическая система координат
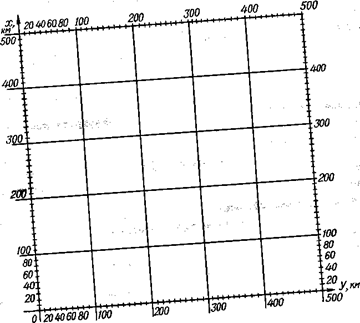
Рис.3 Участок прямоугольной сетки для карты масштаба 1:1 000000

Рис.4 Определение ортодромических координат при выходе на ППМ.
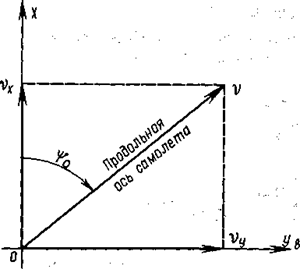
Рис. 7. Составляющие абсолютной скорости самолета
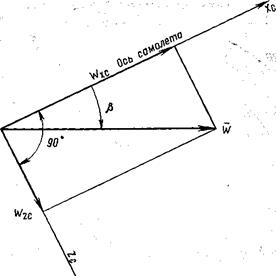
Рис. 6. Составляющие путевой скорости ДИСС в горизонтальной плоскости
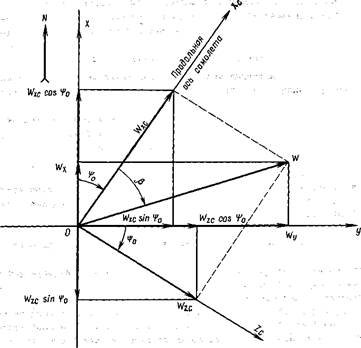
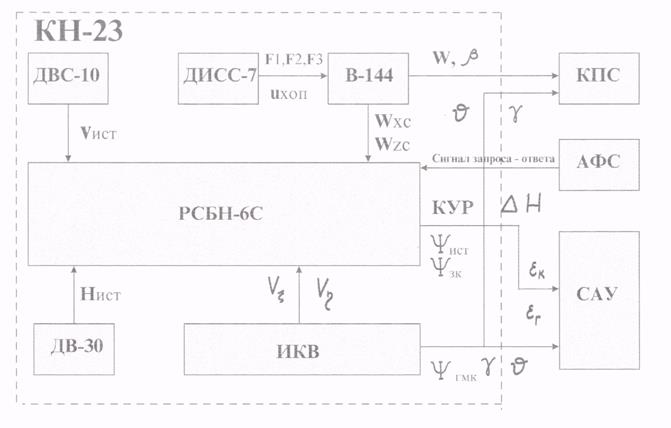 Рис. 7 Составляющие путевой скорости в ортодромической системе
Рис. 7 Составляющие путевой скорости в ортодромической системе
координат
Рис.8 Структурная схема навигационного комплекса КН-23
 Рис.8 Структурная схема навигационного комплекса КН-23
Рис.8 Структурная схема навигационного комплекса КН-23
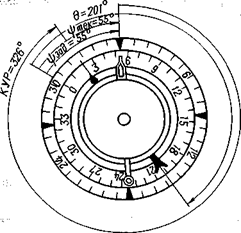
Рис.29*. Отсчет угловых величие по НПП
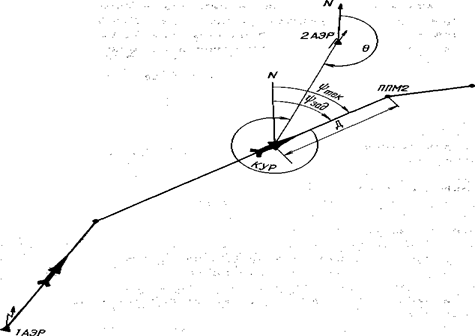
Рис.30*. Полет по заданному маршруту
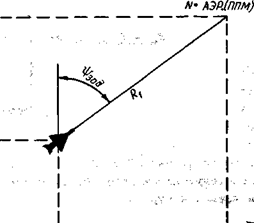
Рис. 9 Схема определения заданного курса и дальности до цели
в режиме маршрутного полета.

Рис. 10 Схема преобразования X и У в X и У в блоке БВН (БВН-01)
для коррекции счисленных координат (Х,У).
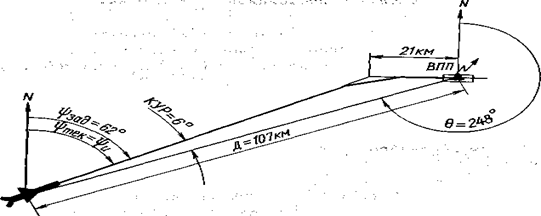
Рис.11 Возврат на аэродром.
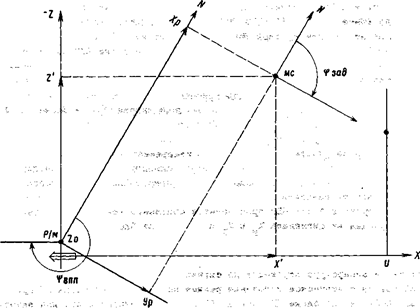
Рис. 11. Схема преобразования X и У в X и Z блоке БВП
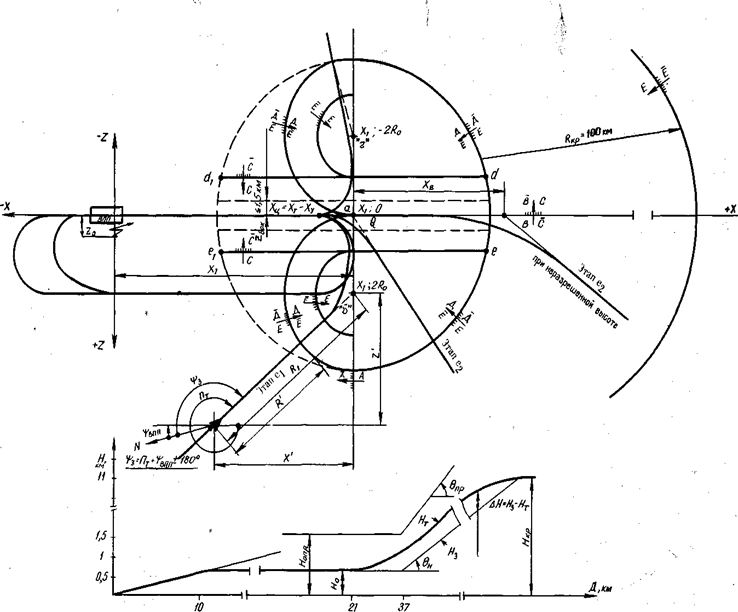 Рис.12 Траектория полёта в режиме возврата при дальности до радиомаяка менее 250 км
Рис.12 Траектория полёта в режиме возврата при дальности до радиомаяка менее 250 км
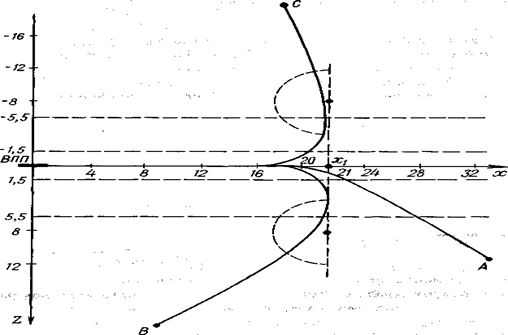
Рис.13 Построение предпосадочного маневра