Автоколебания в контуре регулятора
Причиной возникновения автоколебаний в контурах регуляторов, является инерционность движущихся частей ИМ и регулирующих органов.
частота и амплитуда колебаний ИМ определяются:
-массой движущихся частей ИМ и регулирующего органа,
-временем исполнительного механизма Тим,
-зонами нечувствительности Dн и возврата Dв.
Автоколебания могут привести к поломке ИМ и регулирующего органа.
Они должны быть устранены путем правильного выбора зоны нечувствительности: -объект регулирования выводится на постоянную минимально устойчивую нагрузку,
-устанавливается максимальное Dн
-уменьшается значение Dндо появления колебаний,
- Dнувеличивается минимально возможным шагом до прекращения колебаний.
В результате настройки регулятор имеет:
-минимально допустимую зону нечувствительности, обеспечивающую от-
сутствие колебаний,
-максимально достижимую точность регулирования.
Автоколебания в системе регулированиявозникают вследствие того, что на постоянной нагрузке ОР регулятор устанавливает значение регулирующего воздействия с погрешностью по отношению к значению нагрузки ОР.
Автоколебания в системе регулирования давления пара в судовом паровом котле с ПИД регулятором. Последовательное КУ в данном случае формирует ПИД закон в соответствии с передаточной функцией:
 |
.
11 Регуляторы с интегрирующей обратной связью
из схемы видно, что модуль нечувствительности охвачен функцией 
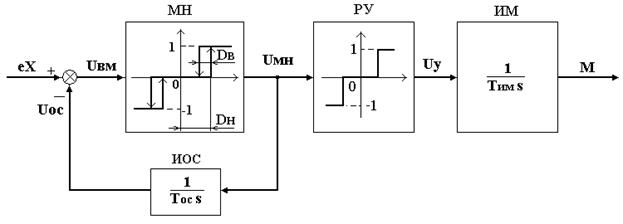
Предварительное определение закона регулирования данного регулятора может быть выполнено по формуле

Таким образом, передаточная функция регулятора показывает, что он является пропорциональным:

12 Регуляторы с инерционной обратной связью Пропорционально-интегральный регулятор.
 Особенностью регулятора является инерционная (апериодическая) обратная связь АОС, представляющая собой типовое динамическое инерционное (апериодическое)
Особенностью регулятора является инерционная (апериодическая) обратная связь АОС, представляющая собой типовое динамическое инерционное (апериодическое) 


 (8.2)
(8.2)
Таким образом, передаточная функция рассматриваемого регулятора приближенно соответствует ПИ закону регулирования, причем:

Рассмотрим работу инерционной обратной связи при изменении ее входного сигнала Uмн, который может изменяться только скачком.
В соответствии с динамическими свойствами инерционного звена сигнал на выходе обратной связи Uос изменяется по экспоненте
 Постоянная времени обратной связи делается различной для нарастания и убывания сигнала Uос: при Uмн ¹ 0 Тос = Тз - время зарядки,
Постоянная времени обратной связи делается различной для нарастания и убывания сигнала Uос: при Uмн ¹ 0 Тос = Тз - время зарядки,
при Uмн = 0 Тос = Тр - время разрядки
13 ЭЛЕКТРИЧЕСКИЕ ИСПОЛНИТЕЛЬНЫЕ МЕХАНИЗМЫ И УСИЛИТЕЛИ
Исполнительный механизм представляет собой устройство, перемещаю-щее регулирующий орган в соответствии с алгоритмом работы регулятора.
Регулирующими органами судовых объектов регулирования являются:
-клапаны,-золотники,- поворотные затворы,- задвижки и др.
Электрические ИМ состоят из следующих основных элементов:
- электродвигатель, служащий источником силового механического воздейст-
вия на регулирующий орган;
- редуктор как передаточно-преобразовательное устройство, предназначенное
для получения определенной скорости регулирующего органа и требуемого
перестановочного усилия на нем;
-датчик положения ИМ, формирующий сигнал обратной связи;
- концевые выключатели, предназначенные для автоматической остановки ре-
гулирующего органа в конечных или промежуточных положениях;
- тормозное устройство, фиксирующее положение регулирующего органа при
отсутствии питания электродвигателя,
- устройства защиты электродвигателя по току и тепловому режиму и др.
Как правило, в регуляторах судовых агрегатов и механизмов применяются однооборотные ИМ, выходной вал редуктора которых поворачивается на некоторый угол, лежащий в пределах одного оборота.
Блок-схема электрического исполнительного механизма приведена на рис. 11.1.
Электрический исполнительный механизм ЭИМ содержит следующие упомянутые выше элементы:- электродвигатель ЭД,- блок ручного управления РУ, позволяющий вручную перемещать регули- рующий орган,- тормозное устройство Т,-редуктор Р,- регулирующий орган РО,- датчик положения исполнительного механизма ДПИМ,- блок конечных выключателей КВ,
- прибор ПП, показывающий положение РО. 
Рис. 11.1 Блок-схема электрического исполнительного механизма.
Данные ЭИМ применяются:
-в электрических регуляторах с постоянной скоростью ИМ: -с жесткой обратной связью (
- со следящей системой с обратной связью на модуле нечувствительности;- в электрических регуляторах с переменной скоростью ИМ В регуляторах с переменной скоростью ИМ и регулированием частоты вращения электродвигателя применяются ЭИМ, блок-схема которого приведена на рис. 11.2.
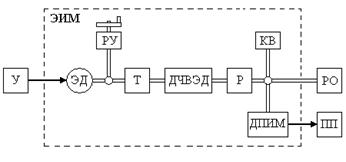
Рис. 11.2 Блок-схема электрического исполнительного механизма с датчиком частоты вращения электродвигателя.
Дополнительно к рассмотренному выше ЭИМ данный механизм содержит встроенный датчик частоты вращения электродвигателя ДЧВЭД.
Обычно в ЭИМ применяются фрикционные тормозные устройства с электромагнитным управлением. При отсутствии напряжения на ЭД тормозное устройство фиксирует положение ротора ЭД под воздействием пружины. Напряжение на электромагнит тормоза подается одновременно с подачей напряжения на электродвигатель. Возникающее при этом усилие на электромагните освобождает тормозные колодки и ротор ЭД может свободно вращаться.
Электродвигатели ИМ практически не работают в установившемся режиме. Для их работы характерны частые пуски, остановки и реверсы.
В судовых электрических регуляторах используются:
- двухфазные асинхронные двигатели переменного тока, если допустима
постоянная скорость ИМ,
-двигатели постоянного тока (коллекторные и бесконтактные), если необ-
ходима переменная скорость ИМ.
Наибольшее применение в судовых электрических регуляторах получили усилители, построенные на тиристорных преобразователях напряжения [10].
Они обладают следующими достоинствами:
- высокий коэффициент полезного действия,
- высокий коэффициент усиления,
- безинерционность,
- способность допускать большие токи (десятки и сотни ампер).
В данном разделе из всех возможных типов усилителей рассматриваются только те, которые используются в судовых регуляторах.