Принципы работы ИНС, определяемые параметры.
Инерциальные навигационные системы (ИНС) основаны на измерении ускорений ВС по осям системы координат. Ускорения измеряются устройствами, называемыми акселерометрами. Принцип действия акселерометра основан на свойстве инерции. В упрощенном виде акселерометр представляет собой трубку с расположенным внутри нее грузом в виде шарика (рис. 8.15). Если трубка движется с ускорением, направленным по ее оси, то груз вследствие своей инерции смещается в сторону, противоположную ускорению. Смещение тем больше, чем больше ускорение. Если ускорение прекращается, пружина возвращает груз в нулевое положение. Таким образом, измеряя смещение, можно измерять ускорение.
Современные акселерометры обладают высокой чувствительностью и могут измерить ускорение, составляющее одну миллионную от ускорения свободного падения.
Два акселерометра расположены в горизонтальной плоскости и ориентированы на север-юг и восток-запад. Они предназначены для измерения ускорений по этим направлениям. Третий расположен вертикально (рис. 8.16).
Из физики и математики известно, что ускорение является производной от скорости, то есть характеризует быстроту ее изменения. Соответственно, скорость – это производная расстояния. Операцией, обратной дифференцированию (взятию производной), является интегрирование. Следовательно, если значение производной (измеренное ускорение) известно, то после его интегрирования получим скорость, а после интегрирования скорости получим пройденное расстояние
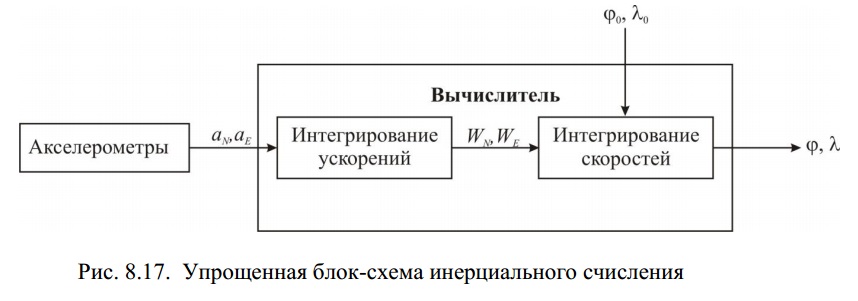
Интегрирование и все прочие расчеты выполняются входящими в состав ИНС цифровыми вычислителями (микропроцессорами).
Таким образом, как бы ни был ориентирован самолет в пространстве, то есть, какими бы ни были курс, крен и тангаж, для счисления пути должны использоваться ускорения в системе координат, жестко связанной с Землей. В зависимости от того, каким образом обеспечивается выполнение этого условия, ИНС можно разделить на две группы:
- основанные на использовании гироплатформы (будем их называть традиционными ИНС),
- бесплатформенные ИНС.
Первыми в 40-е годы ХХ века были разработаны и на протяжении пятидесяти лет совершенствовались традиционные ИНС. В этих системах акселерометры установлены на основе, называемой гироплатформой. Гироплатформа на протяжении всего полета должна располагаться строго горизонтально и ориентирована по направлению меридиана. В этом случае акселерометры независимо от поворотов ВС всегда ориентированы по осям системы координат, связанной с Землей − один акселерометр ориентирован на север, второй на восток и третий вверх.
Гироплатформа удерживается в нужном положении с помощью гироскопов – в принципе таких же, которые рассматривались в главе о гироскопических курсовых приборах, но гораздо более точных, имеющих малый собственный уход.
В последней четверти прошлого века стали развиваться бесплатформенные ИНС, которые не совсем корректно называют системами на лазерных гироскопах. В этих системах акселерометры жестко закреплены на самолете, ориентированы по его строительным осям и, естественно, вращаются вместе с ним, измеряя ускорения вдоль осей самолета. Значения же ускорений по осям земной системы координат получаются расчетным путем.
Инерциальные навигационные системы обладают рядом достоинств и преимуществ перед другими навигационными системами.
1. Автономность. ИНС не требуют для своей работы установки какого-либо наземного оборудования. Все, что необходимо для счисления пути, находится на борту.
2. Широкая область возможного применения. ИНС, могут использоваться практически над всей территорией земного шара, полярные районы, под водой и в космосе.
3. Абсолютная помехозащищенность. Поскольку ИНС основана на использовании свойства инерции тел, не существует естественных и невозможно создать искусственные помехи работе системы. Современная наука пока не знает способа, которым можно было бы заставить акселерометр на летящем ВС измерить неправильное ускорение.
4. Возможность измерения всех основных параметров, необходимых для навигации.
Разумеется, у ИНС имеются и недостатки:
· необходимость знания начальных координат
· возрастание погрешностей счисления со временем полета и вытекающая отсюда необходимость коррекции кординат.
Но с появлением бесплатформенных ИНС ситуация быстро изменилась. ИНС стали меньше по размерам, проще, дешевле. А со временем они обогнали традиционные ИНС и по точности.
Конструктивно ИНС состоит из нескольких блоков.
1. Инерциальный блок (Inertial Refrrence Unit, IRU), который в БИНС содержит лазерные гироскопы и акселерометры, а в традиционных ИНС гироплатформу (рис. 8.29). Таких блоков может быть два или три, а поступающая от них информация обрабатывается совместно. В состав блока могут входить и микропроцессоры, выполняющие необходимые вычисления (интегрирование ускорений и т.д.).
2. Блок выбора режима работы (Mode Selector Unit, MSU). С его помощью можно включить различные режимы: навигации, выставки системы и др.
3. Пульт управления и индикации (Inertial Sensor Display Unit, ISDU). С помощью этого блока пилот может информацию об измеренных системой параметрах, а также ввести в систему необходимые данные (например, начальные координаты).
Параметры определяемые с помощью ИНС:
Инерциальные системы предназначены для определения координат места самолета. Но в процессе их определения можно получить значения многих других параметров, необходимых для навигации. Перечислим основные из этих параметров и рассмотрим, каким образом они могут быть получены:
1. Курс, крен и тангаж. Это параметры, определяющие угловое положение самолета относительно трех осей. В традиционных ИНС гироплатформа стабилизирована по меридиану и в горизонтальной плоскости, поэтому не составляет труда определить угловое положение ВС относительно гироплатформы, то есть три перечисленных параметра. В бесплатформенных системах эти параметры рассчитываются путем интегрирования угловых скоростей.
ИНС непосредственно измеряет истинный курс, то есть курс относительно текущего географического меридиана. Но, поскольку текущие счисленные координаты всегда известны, вычислитель ИНС (или центральный вычислитель навигационного комплекса самолета) может рассчитать и ортодромический курс относительно любого опорного направления.
В памяти современных ИНС хранится модель магнитного поля Земли, с помощью которой вычислитель может рассчитать магнитное склонение в точке расположения самолета. Тогда система может определить и магнитный курс, вычтя магнитное склонение из измеренного истинного курса.
У современных БИНС погрешности определения крена и тангажа составляют 0,05-0,1°, а истинного курса около 0,4°. Погрешность определения магнитного курса зависит еще и от точности модели магнитного поля и составляет порядка 1-1,5°.
2. Угловые скорости изменения курса, крена, тангажа. В бесплатформенных системах эти параметры непосредственно измеряются лазерными гироскопами (с погрешностью порядка 0,1º в секунду), а в традиционных ИНС при необходимости могут быть получены расчетным путем.
3. Ускорения самолета по трем перпендикулярным осям. В традиционных ИНС ускорения измеряются по осям земной системы координат (на север, на восток, вверх), а в БИНС – по строительным осям ВС (вперед, вправо, вверх) и затем пересчитываются в земную систему координат. Значения ускорений нигде не индицируются, а только используются для дальнейших расчетов.
4. Скорости перемещения ВС по трем осям земной системы координат: на север WN, на восток WE, вверх Wверт . Разумеется, скорости, как и ускорения могут быть фактически быть направлены и на юг, запад, вниз – это отразится в знаке перечисленных скоростей. Погрешности определения горизонтальных составляющих скорости составляют единицы километров в час, а вертикальной скорости порядка 0,2 м/с.
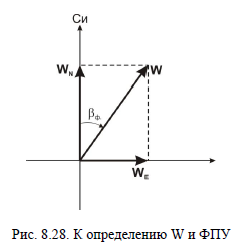
5. Путевая скорость W. Поскольку составляющие путевой скорости известны, то и путевая скорость (рис. 8.28) может быть определена по формуле:
6. Фактический путевой угол βФ. Фактический истинный путевой угол (см. рис. 8.28), может быть определен по формуле:
Путем вычитания магнитного склонения может быть получен и магнитный путевой угол.
7. Угол сноса α. Поскольку фактический путевой угол βФ и курс γ известны, то в соответствии с навигационным треугольником скоростей 
8. Географические координаты места самолета. В простейшем случае, если принять Землю за сферу, то по составляющим путевой скорости могут быть рассчитаны сферические широта φ и долгота λ места самолета по формулам (8.6). В вычислителе может быть запрограммирован алгоритм учета поправок в координаты за счет сжатия Земли или алгоритм расчета координат на поверхности земного эллипсоида. Возможно, в этом и нет особой необходимости. Ведь требуемая международными документами точность определения счисленных координат с помощью ИНС, которая и реализована в современных системах, составляет 1 морскую милю (1,852 км) за час полета, а поправки за счет сжатия Земли имеют гораздо меньшую величину.
9. Высота полета. Высота является третьей пространственной координатой и, как и горизонтальные координаты (φ и λ), может быть рассчитана с помощью ускорения, измеряемого вертикальным акселерометром. Полученная таким образом высота, называемая иногда инерциальной высотой, имеет такой же порядок точности как и горизонтальные координаты. Разумеется, для высоты это совершенно неудовлетворительная точность и поэтому инерциальная высота пока не используется в навигации ни для эшелонирования, ни для предотвращения столкновений с препятствиями. Но она может использоваться в алгоритмах работы самой ИНС. Например, для расчета радиуса Земли с учетом высоты полета, необходимого для определения положения текущей горизонтальной плоскости.
Можно видеть, что перечисленный список определяемых ИНС параметров включает в себя почти все величины, необходимые для навигации. Тем не менее, ИНС самостоятельно не может определить, например, скорость и направление ворость, которую система не измеряет. Для расширения возможностей современных ИНС на вход их вычислителей подается информация от других бортовых систем. Например, от системы воздушных сигналов может поступать истинная воздушная скорость и барометрическая высота. В этом случае возможно и определение ветра.