Частотные преобразователи, конверторы, векторное управление и вентильно-индукторные машины
ЛЕКЦИЯ 11. ОСНОВЫ ЭЛЕКТРОМЕХАННИКИ (ПРОДОЛЖЕНИЕ),
ВРАЩАЮЩИЕСЯ МЕХАНИЗМЫ
С ЭЛЕКТРОННЫМ УПРАВЛЕНИМ
Частотные преобразователи, конверторы, векторное управление и вентильно-индукторные машины
Переворот в современной электромеханике совершили силовые транзисторы.
Силовой транзистор — это полупроводниковое управляемое быстродействующее устройство. В сочетании с микропроцессорным управлением получается преобразователь переменного тока сначала выпрямлением в постоянный ток, а затем, с помощью инвертора, снова в переменный ток разной частоты и напряжения (рис. 11.1).

Рис. 11.1. Структура преобразователя частоты
Кроме того, появилась возможность превратить преобразователь частоты в регулируемый источник тока. Преобразователь частоты — довольно сложное устройство. Теория, конструкция и эксплуатация частотного преобразователя рассматриваются в специальном курсе. Здесь же ограничимся только рассмотрением основных особенностей преобразования в двух случаях:
1. Преобразователь работает в режиме источника напряжения переменной частоты и величины напряжения.
2. Преобразователь работает в режиме источника тока, переменной частоты и величины тока.
В первом случае преобразователь обычно регулируется так, чтобы отношение напряжения к частоте было бы постоянным. Из условий электрического равновесия:
имеем:
 .
.
Можно считать, что преобразователь частоты является источником магнитного потока. Но если магнитный поток асинхронного двигателя постоянен, то реактивный ток также будет постоянным (при постоянстве воздушного зазора), ток в роторе асинхронного двигателя будет пропорционален моменту на валу двигателя. Это хорошо для обычной эксплуатации подъемных механизмов, насосов и других механизмов подобного типа. В других случаях часто надо поднимать момент при малых скольжениях при пуске механизма, когда проявляются силы сухого трения. В таких случаях переходят на режим увеличения момента при низкой частоте. Замечательным свойством является то, что реактивный ток при этом «не вырабатывается», а «сопровождает» напряжение на выходе частотного преобразователя. Реактивный ток не чувствуется на первичной стороне частотного преобразователя, а генератор работает при косинусе фи, близком к единице. Напряжение на входе частотного преобразователя при этом незначительно уменьшается за счет поворота ротора синхронного генератора относительно статора на нагрузочный угол Ɵ. Как было показано выше, это уменьшение небольшое, порядка 2%.
Во втором случае, когда преобразователь работает в режиме источника тока разной частоты и величины, лучше употреблять более общее понятие «конвертор», что в переводе на русский язык и означает преобразователь.
Для второго случая рассмотрим физику так называемого векторного управления асинхронным двигателем, рис. 11.2.
На рис. 11.2 видим привычную уже картину разложения токов по продольной и поперечной оси. Но разница состоит в том, что здесь первичным является ток. Составляющая тока по продольной оси создает магнитный поток, вращающийся с заданной частотой φ относительно фаз статора. Меняя частоту вплоть до остановки магнитного потока, можно плавно изменять частоту вращения вала. Меняя ток по поперечной оси q, можно менять момент на валу даже при заторможенном состоянии, чтобы, например, не сломать винт судна в ледовой обстановке при встрече с большой льдиной.
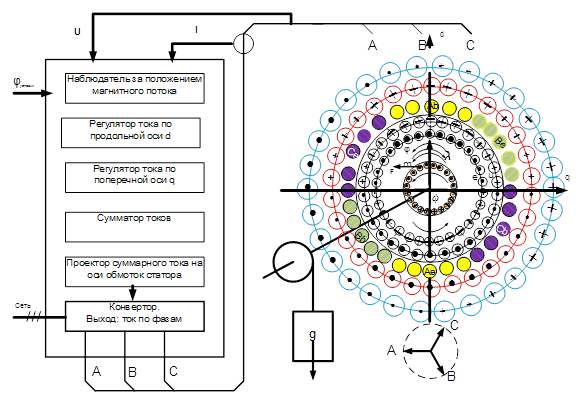
Рис. 11.2. Структура асинхронного двигателя с векторным управлением
Здесь рассмотрена только физика векторного управления, пригодная для практического понимания процессов при указанном управлении на судне при уже готовой установке. Получение расчетных теоретических положений оставлено для изложения в специальных курсах. Процесс совершенствования рассмотренных выше традиционных типов электрических машин продолжается более ста пятидесяти лет. За это время были достигнуты значительные успехи. Однако требования, предъявляемые современными электромеханическими устройствами к электрическим машинам, продолжают расти, а резервы повышения их показателей и характеристик только за счет выше перечисленных инструментов в определенной степени исчерпаны. В определенном смысле регулируемый электропривод с традиционными электрическими машинами отражает эволюционный ход развития электромеханики.
Одним из качественно новых электромеханических преобразователей энергии является вентильно-индукторный двигатель (ВИД).
Бурное развитие ВИД началось примерно 30 лет назад. Вместе с тем следует отметить, что сама концепция этой электрической машины была сформулирована еще в конце тридцатых годов XIX века. Первый двигатель был создан Дэвидсоном и использовался на железной дороге Глазго–Эдинбург для приведения в движение локомотива массой несколько тонн. В силу несовершенства элементной базы (в первом ВИД использовался механический коммутатор) массового применения эти электрические машины в то время не нашли и о них забыли более чем на сто лет.
Вторая половина XX века характеризовалась, с одной стороны, стремительным развитием силовой и информационной электроники, а с другой — все возрастающими требованиями, предъявляемыми к электрическим машинам, которыми традиционным типам электромеханических преобразователей энергии становилось все труднее и труднее удовлетворять. Это создало предпосылки и обеспечило техническую базу для разработки и производства ВИД. В настоящее время многие крупнейшие электротехнические компании мира либо уже серийно производят эти электрические машины, либо готовятся к этому.
Несмотря на свою более чем вековую историю, ВИД представляет собой относительно новый тип электромеханического преобразователя энергии, в теории и практике которого еще много белых пятен. ВИД представляет собой систему, структурная схема которой приведена на рис. 11.3.
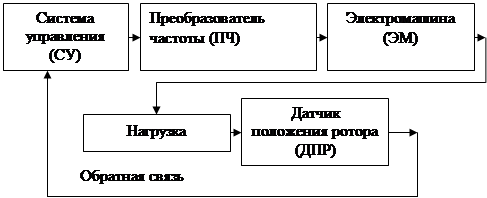
Рис. 113. Структурная схема ВИД
В ее состав входят: электромашина (ЭМ), преобразователь частоты (ПЧ), система управления (СУ), нагрузка и датчик положения ротора (ДПР). Функциональное назначение этих элементов ВИД очевидно: преобразователь частоты обеспечивает питание фаз ЭМ однополярными импульсами напряжения прямоугольной формы; ЭМ осуществляет электромеханическое преобразование электрической мощности; система управления в соответствии с заложенным в нее алгоритмом и сигналами обратной связи, поступающими от датчика положения ротора, управляет данным процессом.
По своей структуре ВИД ничем не отличается от классической системы регулируемого электропривода. Именно поэтому он и обладает всеми ее свойствами. Однако, в отличие от регулируемого электропривода, например, с асинхронным двигателем, электромашина в ВИД не является самодостаточной. Она принципиально не способна работать без преобразователя частоты и системы управления.
Электромашина, входящая в состав ВИД, может иметь различные конструктивные исполнения. На рис. 11.4, для примера, приведено поперечное сечение 4-фазной ЭМ конфигурации 8/6. При обозначении конфигурации ЭМ первая цифра указывает число полюсов статора,
вторая — ротора.
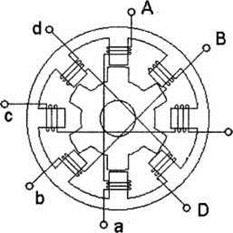
Рис. 11.4. Поперечное сечение 4-фазной ЭМ конфигурации 8/6
Анализ рис. 11.4. показывает, что ЭМ имеет следующие конструктивные особенности.
Сердечники статора и ротора имеют явнополюсную структуру.
Число полюсов относительно невелико. При этом число полюсов статора больше числа полюсов ротора.
Сердечники статора и ротора выполняются шихтованными.
Обмотка статора - сосредоточенная катушечная.
Фаза ЭМ, как правило, состоит из двух катушек, расположенных на диаметрально противоположных полюсах статора.
Обмотка на роторе ЭМ отсутствует. Такие машины носят название индукторных машин. Отсюда и название «Вентильно-индукторная машина».
В последнее время в мире наблюдается устойчивая тенденция выполнения преобразователя частоты и двигателя в системе регулируемого электропривода в одном корпусе. Такое конструктивное исполнение может быть названо как электропривод интегрального исполнения.
Принцип действия рассмотрим на примере той же машины 8/6 полюсов.

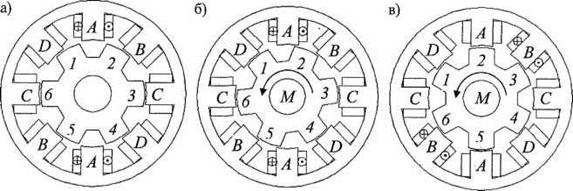
Рис. 43. К пояснению принципа действия ВИД:
а — рассогласованное положение сердечников для фазы А;
б — промежуточное положение сердечников для фазы А;
в — согласованное положение сердечников для фазы А
Предположим, что в положении а по сигналу системы управления произойдет коммутация ключей преобразователя частоты и к фазе А будет приложено постоянное напряжение Ua, тогда по катушкам фазы потечет ток Iа, который создаст МДС Fa-. Эта МДС, в свою очередь, возбудит в машине магнитное поле.
В магнитном поле фазы А ротор будет стремиться ориентироваться таким образом, чтобы магнитный поток, пронизывающий его, принял максимальное значение. При этом на сердечники статора и ротора будут действовать одинаковые по значению и обратные по направлению электромагнитные силы (ЭМС) тяжения. Рассогласованное положение представляет собой точку неустойчивого равновесия. Действительно, если под действием какого-либо внешнего воздействия ротор отклонится от рассогласованного положения в том или ином направлении, то равнодействующая азимутальных составляющих ЭМС сердечников уже не будет равна нулю. Следовательно, возникнет вращающий момент, который будет стремиться повернуть ротор в направлении от рассогласованного положения.
Возьмем другое положение ротора, показанное на рис. 11.4б. Здесь фаза А имеет большее потокосцепление и индуктивность, чем в рассогласованном положении, что объясняется меньшей величиной зазора между сердечниками. При этом равнодействующая азимутальных составляющих ЭМС сердечников отлична от нуля, и созданный ею электромагнитный момент стремится повернуть ротор ЭМ против часовой стрелки.
Вращение ротора будет продолжаться до тех пор, пока он не займет положение, показанное на рис. 11.4в. Оно называется согласованным положением фазы В.
Согласованным положением сердечников статора и ротора ЭМ для какой-либо фазы называется такое положение, при котором ось каждой катушки этой фазы совпадает с одной из осей ротора, т.е. зубцы фазы располагаются строго напротив полюсов ротора. Это положение характеризуется максимальным значением индуктивности фазы и сцепленного с ней магнитного потока, что объясняется минимальной величиной магнитного сопротивления зазора между сердечниками.
В этом положении ЭМС притяжения сердечников имеют только радиальные составляющие. В силу чего вращающий момент ЭМ в этом положении равен нулю.
Согласованное положение представляет собой точку устойчивого равновесия. Действительно, если под действием какой-либо внешней силы ротор отклонится от согласованного положения в ту или иную сторону, то возникший электромагнитный момент будет стремиться вернуть его в согласованное положение.
Для того чтобы продолжить однонаправленное вращение ротора, необходимо еще до достижения согласованного положения фазы А осущест- вить коммутацию ключей преобразователя частоты, в результате которой фаза А должна быть отсоединена от источника питания, а фаза, момент которой стремится продолжить вращение ротора в прежнем направлении, подключена к нему. В данном случае это фаза В.
Взаимное положение сердечников статора и ротора, близкое к согласованному положению для фазы А, является для фазы В близким к рассогласованному положению. То есть при подаче на нее напряжения и протекании по ее катушкам тока возникнет отличный от нуля вращающий момент, который будет стремиться повернуть ротор против часовой стрелки.
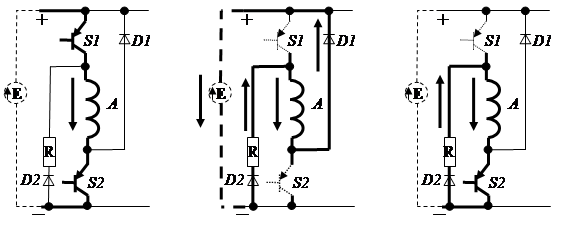
а б в
Рис. 11.5. Этапы коммутации фаз:
а — этап возбуждения; б — этап начального интенсивного гашения поля, в — этап полного гашения поля.
Жирными линиями выделены контуры протекания тока
при различных состояниях ключей S1 и S2 (точечный пунктир означает, что ключ разомкнут)
Необходимость коммутации фаз еще до достижения согласованного положения сердечников диктуется желанием получить как можно меньшее значение тока в отключаемой фазе при достижении ее согласованного положения. Дело в том, что после отключения фазы магнитное поле не может исчезнуть мгновенно. Работа электрической сети, затраченная на создание поля, должна быть израсходована (отдана обратно в сеть или выделиться в виде тепла). В силу этого в обмотке фазы возникает ЭДС самоиндукции, и ток фазы остается отличным от нуля еще некоторое время после ее коммутации. Он замыкается через встречно включенные диоды D1, D2 преобразователя частоты (учтем известное в электротехнике правило — «диод для обратного тока имеет бесконечную проводимость для обратного тока не более тока текущего в прямом направлении и «внутреннее сопротивление источника ЭДС равно нулю») и питающую сеть (рис. 11.5б). В конечном итоге ток достигнет нулевого значения (работа магнитного поля выделится в виде электрических потерь на активных сопротивлениях фазы, встречно включенных диодов, обозначено в совокупности R). Однако если этот ток будет отличен от нуля в согласованном положении фазы, то при дальнейшем вращении ротора созданное им магнитное поле приведет к возникновению тормозного электромагнитного момента. Поэтому в конце цикла коммутации открывается ключ S2, и фаза оказывается в замкнутом контуре (рис. 11.5в).
Фаза В будет находиться под напряжением до тех пор, пока ротор не достигнет положения, близкого к согласованному. При достижении этого положения от ДПР в систему управления поступит соответствующий сигнал, обработка которого приведет к выдаче управляющего воздействия на преобразователь частоты и переключению фаз В и С. Цикл повторится.
Таким образом, проводя последовательную коммутацию фаз, можно осуществить однонаправленное вращение ротора.