И методические указания по выполнению
Задания к контрольной работе
По дисциплине «ТЕОРИЯ МЕХАНИЗМОВ И МАШИН»
и методические указания по выполнению
Екатеринбург, 2002
Задания к контрольной работе по дисциплине «Теория механизмов и машин». Екатеринбург, 2002.
Составители: доцент, канд. техн. наук Т. А. Киреева,
доцент, канд. техн. наук Н. Н. Эльяш,
доцент, канд. техн. наук Е. С. Гурьев
Задания к контрольной работе по дисциплине «Теория механизмов и машин» и методические указания по выполнению для студентов заочной формы обучения машиностроительного факультета. Приведены примеры решения задач.
Одобрены на заседании кафедры механики.
Протокол № 9 от 30.05.2002 г.
Зав. кафедрой О. С. Лехов
Рекомендовано к печати методической комиссией Машиностроительного института РГППУ. Протокол № 10 от 10.06.2002 г.
Председатель методической комиссии
МСФ ИПИ РГППУ В. П. Подогов
© Российский государственный
профессионально-педагогический
университет, 2002
ВВЕДЕНИЕ
Методические указания и задания по курсу теории механизмов и машин составлены в соответствии с программой данного курса, читаемого в Российском государственном профессионально-педагогическом университете.
Приступая к решению контрольных задач, следует изучить следующие разделы дисциплины: структурный анализ механизмов, теория эвольвентного зацепления, кинематика зубчатых передач.
Для выполнения контрольных работ студенту рекомендуется использовать литературу, приведенную в конце методических указаний.
Контрольную работу студенты выполняют на стандартных листах формата А4 или в ученических тетрадях. В контрольной работе должны быть приведены схема и условие задачи.
По курсу теории механизмов и машин студент выполняет контрольную работу, состоящую из трех задач. Номер схемы или варианта задачи студент выбирает по последней цифре своего шифра, т.е. по последней цифре номера зачетной книжки. В задачах 1, 2, 3по по шифру выбирается схема задачи.
Задача 1. Тема «Структурный анализ механизмов»
Структурный анализ - это раздел курса, в котором изучается строение механизмов, т.е. исследуется, из каких звеньев состоит механизм, каким образом соединяются звенья в кинематическую цепь, какова степень подвижности механизмов.
Механизмом называется система тел, предназначенная дня преобразования движения одного или нескольких твердых тел в требуемые движения других твердых тел.
Твердое тело, входящее в состав механизма, называется звеном. Звено может состоять из одной или нескольких неподвижно соединенных деталей.
Соединение двух соприкасающихся звеньев, допускающее их относительное движение, называется кинематической парой. Кинематические пары классифицируют по числу степеней свободы или по числу условий связи. Взависимости от вида элементов кинематических пар они подразделяются на высшие и низшие.
Система звеньев, образующих между собой кинематические пары, называется кинематической цепью. Различают замкнутые и незамкнутые кинематические цепи. Если известные ранее механизмы представляли собой замкнутые кинематические цепи, то некоторые современные механизмы (например, механизмы манипуляторов) образованы из незамкнутых кинематических цепей.
В каждом механизме есть одно неподвижное (или принимаемое за неподвижное) звено, называемое стойкой.
Из неподвижных звеньев выделяют входные и выходные. Входному звену сообщается движение, преобразуемое механизмом в требуемые движения других звеньев. Звено, совершающее движение, для выполнения которого предназначен механизм, называется выходным звеном (ранее звенья с указанным функциональным назначением назывались соответственно ведущим и ведомым).
Число степеней свободы пространственных и плоских механизмов определяются соответственно по формулам Малышева и Чебышева.
Механизмы разделяются на плоские и пространственные. Плоским называется механизм, все подвижные звенья которого совершают движения, параллельные одной и той же неподвижной плоскости.
К основным видам механизмов относятся: рычажные, кулачковые, зубчатые, фрикционные, механизмы с гибкими звеньями, гидравлические, пневматические, волновые.
Рычажными называют механизмы, в состав которых входят только низшие кинематические пары. Эти механизмы могут обеспечивать передачу значительных сил, так как в низших кинематических парах звенья соприкасаются по поверхности. Ввиду ограниченного числа видов низших кинематических пар многие важные законы преобразования движения звеньев не могут быть получены с помощью рычажных механизмов. В этом плане большими возможностями обладают механизмы с высшими кинематическими парами, в которых звенья соприкасаются по точкам или по линиям. Однако, они менее износоустойчивы, чем низшие.
В системах управления широко применяются кулачковые механизмы. Кулачковый механизм состоит из кулачка, толкателя и стойки. Кулачок - это звено, которому принадлежит элемент высшей пары. Разнообразие форм, которые можно придать кулачку, определяют большое разнообразие возможных преобразований движения. Одна из особенностей кулачковых механизмов состоит в том, что может быть обеспечено движение выходного звена с остановками за конечный отрезок времени при непрерывном движении входного.
Кулачковые механизмы различают по виду кулачка, характеру движения входного и выходного звеньев, по виду элемента высшей пары на звене, соприкасающимся с кулачком (плоскость, цилиндрическая поверхность ролика, сферическая поверхность и т. п.), по способу замыкания высшей кинематической пары.
Все законы движения, удовлетворяющие одним и тем же граничным условиям, сравнивают по многим безразмерным коэффициентам, выражающим ту или иную кинематическую или динамическую характеристику.
Движение выходного звена кулачкового механизма с принятым законом движения обеспечивается выбором соответствующей формы профиля кулачка (сечения поверхности кулачка плоскостью, перпендикулярной оси вращения). Искомый профиль кулачка определяется по точкам. Формулы для вычисления получают, используя метод обращения движения. Для контроля вычислений и предварительного определения формы кулачка и некоторых характеристик механизма используют графическое построение профиля.
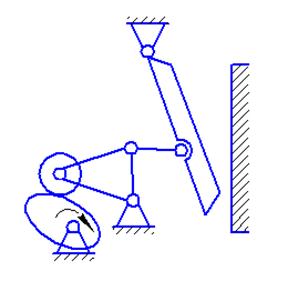
Условие.Схемы плоских механизмов представлены на рис 1.
Произвести структурный анализ плоских механизмов с высшими и низшими кинематическими парами, обозначить звенья и кинематические пары механизма, класс и наименование каждой кинематической пары, определить число степеней подвижности в механизме, разложить механизм на структурные группы, указать класс и порядок каждой структурной группы, определить класс механизма.
При наличии высших кинематических пар произвести их замену и нарисовать схему заменяющего механизма.
 |

Схема 0 Схема 1
 | 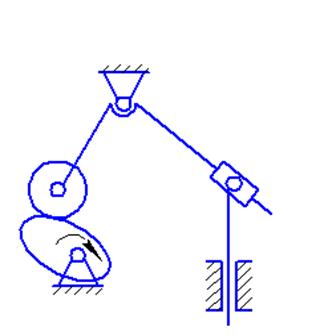 | ||
Схема 2 Схема 3
Рис. 1
 | |||
 | |||
Схема 4 Схема 5
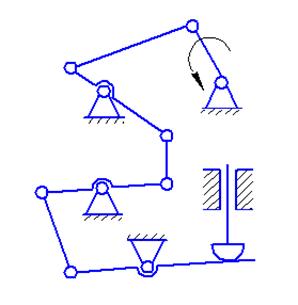 |

Схема 6 Схема 7
Продолжение рис. 1
 | |||
 | |||
Схема 8 Схема 9
Окончание рис. 1
Пример решения задачи 1
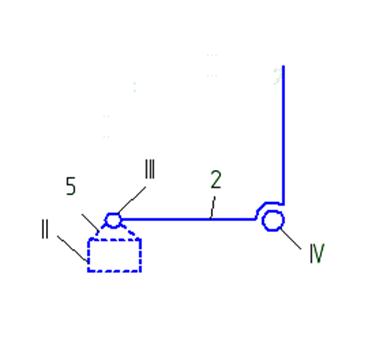
Условие. Произвести структурный анализ механизма приемника давления электрического дистанционного манометра (рис. 2,а).
Решение. Степень подвижности механизма W определяем по формуле Чебышева [2, с.40].
W =  ( 1.1)
( 1.1)
где n - число подвижных звеньев;
Р5 - число кинематических пар 5-го класса;
Р4 - число кинематических пар 4-го класса.
Арабскими цифрами на схеме (рис 2,а) обозначены звенья механизма, а именно:
1 - ползун; 2- коромысло; 3- шатун; 4- ползун.
Итого число подвижных звеньев n =4.
Анализ кинематических пар, обозначенных на схеме римскими цифрами, сведен в табл. 1
Таблица 1
Анализ кинематических пар механизма
| Обозначение кинематической пары | I | II | III | IV | V | VI |
| Звенья, образующие кинематическую пару | 0-1 | 1-2 | 2-0 | 2-3 | 3-4 | 4-0 |
| Класс кинематической пары |
Таким образом, число кинематических пар 5-го класса Р5 = 5, 4-го класса Р4 = 1.
В механизме отсутствуют пассивные связи и звенья, вносящие лишние степени свободы. Степень подвижности механизма по формуле (1.1).
W =  .
.
Ведущее звено задано в условии примера, и оно должно быть одно, так как W = 1.
Структурный анализ механизма по Ассуру-Артоболевскому выполняется для кинематической цепи, состоящей только из кинематических пар 5-го класса. Если же исследуемый механизм имеет кинематические пары 4-го класса, то они предварительно должны быть заменены одним звеном, входящим в две кинематические пары 5-го класса. Получившийся после такой замены механизм называется заменяющим.
Схема заменяющего механизма представлена на рис. 2.б. Дополнительное звено 5 - ползун. Анализ кинематических пар заменяющего механизма сведен в табл.2.
Степень подвижности заменяющего механизма определяется подстановкой в форму Чебышева следующих значений: n = 5, P5= 7:
W = 3× 5- 2× 7 = 1.
Таким образом, степень подвижности осталась равной единице, т.е. замена выполнена верно.
Таблица 2
Анализ кинематических пар заменяющего механизма
| Обозначение кинематической пары | I | II | III | IV | V | VI | VII |
| Звенья, образующие кинематическую пару | 0-1 | 1-5 | 5-2 | 2-0 | 2-3 | 3-4 | 4-0 |
| Класс кинематической пары | |||||||
| Наименование | Посту- патель-ная | Посту- патель-ная | Враща-тельная | Враща-тельная | Враща-тельная | Враща-тельная | Посту- патель-ная |
Следующим этапом структурного анализа является выделение из механизма структурных групп с нулевой степенью подвижности. Эту задачу рекомендуется решать по следующей методике:
а) Отсоединение структурных групп начинать с групп II класса и наиболее удаленных по кинематической цепи от ведущего звена;
б) Если степень подвижности оставшейся кинематической цепи изменилась, то отсоединение сделано неверно, и следует отсоединить пару звеньев в другой комбинации;
в) Если отсоединить группу II класса не удается, то следует рассмотреть возможность отсоединения группы III класса.
г) После отсоединения 1 группы отсоединить от оставшейся кинематической цепи следующею группу и т. д. до тех пор, пока не останется механизм I класса, т. е. ведущее звено, соединенное кинематической парой со стойкой.
Рассмотрим изложенную последовательность на примере заменяющего механизма (рис.2.б). Вначале отделяется группа Ассура второго класса, образованная звеньями 4 и 3, а затем группа второго класса, состоящая из звеньев 2 и 5.
На этом расчленение механизма заканчивается, так как остались ведущее звено 1 и стойка 0, т.е. механизм I класса. Разложение механизма на группы Ассура приведено на рис. 3.
а

 б
б
Рис. 2. а) – исходный механизм; б) – заменяющий механизм.
 а
а
б
 в
в
Рис.3. Структурные составляющие механизма: а) Группа Ассура II класса 2-го вида; б) Группа Ассура II класса 2-го вида; в) Механизм I класса.
Структурный анализ показал, что механизм имеет одну степень свободы и структурная формула его запишется в виде
 I
I  II2 II2
II2 II2
Римские цифры показывают класс структурных групп, а индексы, обозначенные арабскими цифрами, - вид групп.
Класс механизма определяется наивысшим классом структурной группы Ассура, входящей в состав механизма. Для исследуемого механизма наивысший класс присоединенных групп - второй, поэтому весь механизм относится ко II классу (при ведущем звене 1).
Задача 2. Тема «Структурный анализ пространственных механизмов»
Манипуляторы как исполнительные устройства промышленных роботов представляют собой пространственные механизмы различных структурных схем с несколькими степенями подвижности, выполняемые в виде незамкнутых кинематических цепей.
Обычно манипулятор имеет шесть или большее число степеней свободы (подвижности), из которых три используются для перемещения (переноса) объекта из одной точки пространства в другую по заданной траектории с регламентированным законом движения, а три других обеспечивают требуемую ориентацию объекта в пространстве.
Объем, ограниченный поверхностью, огибающей все возможные положения рабочего органа (захвата), называется рабочим объемом манипулятора. Не все части рабочего объема одинаково удобны для выполнения заданных движений захвата. Одни части рабочего объема совершенно свободны для любых движений захвата, в то время как в других его частях на движения захвата могут быть наложены разного рода ограничения.
Под маневренностью манипулятора понимается его число степеней свободы при неподвижном захвате. Сравнение различных схем манипуляторов показывает, что маневренность зависит не только от числа степеней свободы манипулятора, но и от расположения кинематических пар.
В зависимости от степени совершенства системы управления и оснащенности техническими органами чувств роботы подразделяются на три поколения:
Роботы первого поколения работают по жесткой программе и могут воспроизводить заданные движения манипулятора независимо от внешней обстановки. Программа легко заменяется, чем обеспечивается гибкость перестройки робота на различные операции. Эти роботы находят широкое применение в различных производствах при автоматизации травмоопасных, монотонных, тяжелых ручных операций и пр.
Роботы второго поколения - адаптирующиеся, очувствленные системы. Они снабжены датчиками - техническими органами чувств (зрение, слух, осязание и пр.). Эти роботы классифицируют обстановку (внешнюю и внутреннюю) и производят действия в соответствии со сложившейся обстановкой, т.е. работают по принципу «класс ситуаций - действие». Роботы второго поколения обладают некоторой автономностью и используются для выполнения сборочных работ, исследования морских глубин, космического пространства и пр.
Роботы третьего поколения - интеллектуальные роботы, снабжены элементами искусственного интеллекта. Задание для них задается в весьма общем виде. Они выбирают и осуществляют оптимальное решение поставленной задачи. Такие роботы находятся в стадии разработки и эксперимента.
Степень подвижности пространственных механизмов определяют по формуле А.П.Малышева [2, с.35]
W = 6×n - 5×р5 - 4×р4 - 3×р3 - 2× р2 - р1 , (2.1)
где n - число подвижных звеньев;
p5, р4, ... pi – число кинематических пар 5-го, 4-го, ... i-го класса.
На практике в пространственных механизмах встречаются кинематические пары 5-го класса (вращательная и поступательная); 4-го класса (сферический шарнир и цилиндрическая пара); 3-го класса
(сферическая).
Условные обозначения кинематических пар на схемах приведены в таблице 3.
Примером рычажных пространственных механизмов служат кинематические цепи манипуляторов робототехнических систем.
Манипулятор представляет собой незамкнутую кинематическую цепь с несколькими степенями свободы. В задачу структурного анализа входит определение числа степеней свободы и маневренности манипулятора. Маневренность определяют также по формуле А.П.Малышева, но при этом захват считают неподвижным звеном. Таким образом, маневренность характеризует возможность звеньев манипулятора изменять свое положение при условии, что захват соединен с объектом манипулирования.
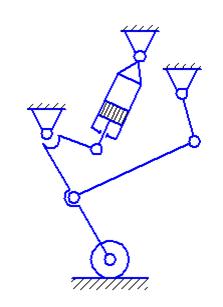
Условие. Для работы манипулятора определить число степеней свободы захвата и маневренность. Указать название, число и класс кинематических пар.
Схемы пространственных механизмов представлены на рис. 4.
 |
Схема 0
 |
Схема 1
Рис. 4

Схема 2
 |
Схема 3
 |
Схема 4
Продолжение рис. 4
,
 |
Схема 5
 |
Схема 6
Продолжение рис. 4
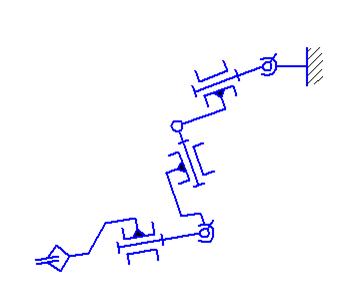
Схема 7
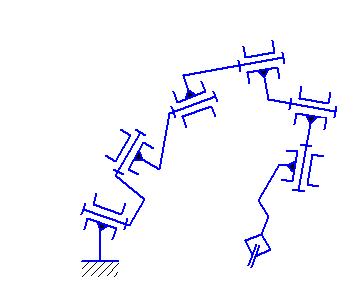 Таблица 3
Таблица 3
Классификация кинематических пар.
| Класс пары | Название пары | Рисунок | Обозначение |
| Шар на плоскости | 
| 
| |
| Цилиндр на плоскости | 
| 
| |
| Сферическая пара | 
| 
| |
| Плоскостная пара | 
| 
| |
| Сферическая с пальцем | 
| 
| |
| Цилиндрическая пара | 
| 
|
| Класс пары | Название пары | Рисунок | Обозначение |
| Вращательная пара | 
| 
| |
| Поступательная пара |

| 
|