Класифікація за конструкторськими ознаками
До таких показників відносяться:
- тип приводів;
- вантажопідйомність;
- кількість маніпуляторів;
- тип і параметри їх робочої зони;
- рухливість і спосіб розміщення;
- виконання за призначенням.
Приводи, які використовуються в маніпуляторах і системах пересування роботів, можуть бути електричними, гідравлічними і пневматичними. Часто їх застосовують в комбінації. Наприклад, в ланках маніпулятора великої вантажопідйомності доречний гідравлічний привід, а в його захватному пристрої - простіший і малопотужний пневматичний привід.
Вантажопідйомність робота - це вантажопідйомність його маніпуляторів, а для транспортного робота ще і його шасі. Вантажопідйомність маніпулятора визначається масою переміщуваних ним об'єктів і залежно від призначення робота може складати від одиниць грам(надлегкі роботи, наприклад, вживані в мікроелектронній промисловості) до декількох тисяч кілограм(надважкі, наприклад, транспортні і космічні роботи).
Кількість маніпуляторів у роботів у більшості випадків обмежена одним. Проте залежно від призначення існують конструкції роботів з 2, 3 і зовсім рідко 4 маніпуляторами. Зазвичай маніпулятори робота виконують однаковими, але є конструкції роботів і з різними маніпуляторами. Наприклад, існують промислові роботи для обслуговування пресів холодного штампування з двома різними маніпуляторами: один, основний, для узяття заготівлі і установки її в прес і інший, спрощеній конструкції, для виконання простішої операції вилучення готової деталі.
Тип і параметри робочої зони маніпулятора визначають область, що оточує робот простору, в межах якої він може здійснювати маніпуляції, не пересуваючись, т. е. при нерухомому підстав. Робоча зона маніпулятора - цей простір, в якому може знаходитися його робочий орган при усіх можливих положеннях ланок маніпулятора. Форма робочої зони визначається системою координат, в якій здійснюється рух робочого органу маніпулятора, і числом мір рухливості маніпулятора.
Рухливість робота визначається наявністю або відсутністю у нього системи пересування. У першому випадку роботи називають мобільними, а в другому - стаціонарними. Відповідно до призначення роботів в них застосовують системи пересування практично усіх відомих на сьогодні типів : від наземних(колісних, гусеничних та ін.) до призначених для пересування у воді, повітрі і космосі. Специфічним способом пересування, що відноситься до робототехнике, є те, що крокує.
За способом розміщення стаціонарні і мобільні роботи бувають підлоговими, підвісними(мобільні роботи цього типу зазвичай переміщаються по піднятій монорейці) і вбудовуваними в інше устаткування(наприклад, з розміщенням на станині обслуговуваного ним верстата). Виконання робота за призначенням залежить від зовнішніх умов, в яких він повинен функціонувати. Розрізняють виконання нормальне, пылезащитное, теплозахисне, вологозахисне, вибухобезпечне і т. д.
Класифікація за способом управління
За цією ознакою розрізняють роботи з програмним, адаптивним і інтелектуальним управлінням. Управління рухом по окремих мірах рухливості може бути безперервним і дискретним. У останньому випадку управління рухом здійснюється завданням послідовності точок із зупинкою в кожній з них. Простим варіантом дискретного управління є циклове, при якому кількість точок позиціонування по кожній мірі рухливості мінімально - найчастіше обмежено двома - початковою і кінцевою.
Класифікація за швидкодією і точністю рухів
Ці параметри взаємозв'язані і характеризують динамічні властивості роботів. Швидкодія маніпулятора визначається швидкістю переміщення його робочого органу і може бути розбите на 3 діапазони залежно від лінійної швидкості: мале - до 0,5 м/с; середнє - від 0,5 до 1-3 м/с; високе - при великих швидкостях.
Найбільша швидкість маніпуляторів сучасних роботів досягає 10 м/с і вище. Для значної частини сфер застосування роботів цей параметр дуже важливий, оскільки зумовлює їх продуктивність. Основна трудність при підвищенні швидкодії пов'язана з відомим протиріччям між швидкодією і точністю.
Точність маніпулятора і системи пересування робота характеризується погрішністю позиціонування. Найчастіше точність роботів характеризують абсолютною погрішністю. Точність роботів загального застосування можна розбити на 3 діапазони залежно від лінійної погрішності:
- мала - від 1 мм і більше;
- середня - від 0,1 до 1 мм;
- висока - при меншій погрішності.
Найменшу точність мають роботи, призначені для виконання найбільш грубих, наприклад, транспортних рухів, а найбільшу, мікронну - роботи, використовувані, наприклад, в електронній промисловості.
В порівнянні з людською рукою істотним недоліком сучасних роботів доки є зниження точності зі збільшенням ходу маніпулятора, тоді як у людини ці параметри значною мірою розв'язані завдяки розділенню рухів на грубі(швидкі) і точні.
Розглянуті раніше параметри роботів відносяться до класифікаційних, т. е. використовуються при формуванні типажу роботів і, відповідно, їх найменувань. Наприклад, назви: легкий пневматичний промисловий робот з цикловим управлінням для обслуговування пресів холодного штампування, гідравлічний промисловий робот забарвлення і т. д.
Система роботів побудована за модульним принципом і включає до свого складу наступні основні елементи (Рис. 3.15) :
- контроллер, що управляє;
- підсистему розпізнавання візуальних образів;
- підсистему розпізнавання звукових образів;
- розвинену підсистему сенсорного очувствления;
- бібліотеку образів руху і моделей сприйняття;
- підсистему ухвалення рішень.
Відкритість архітектури системи управління забезпечує потенційну можливість незалежної заміни або нарощування функцій окремих модулів.

Рис. 3.15. Узагальнена схема системи управління прототипу інтелектуального робота 100
Робототехніка в промисловості
Одне з призначень робототехники — виконання різного роду робіт в екстремальних зовнішніх умовах або небезпечних і шкідливих для людини, або що взагалі повністю виключають його присутність. Відповідний розділ робототехники отримав найменування «екстремальна робототехника».
Під екстремальними умовами розуміються як аварійні ситуації, включаючи стихійні лиха, так і штатні екстремальні ситуації, визначувані технологією виробництва. У міру інтенсифікації виробництва питома вага і тих, і інших неухильно росте. Це відноситься, зокрема, до атомної енергетики і промисловості, хімічної, металургійної, гірничодобувної галузям промисловості, підводним роботам, освоєнню космосу, військовій справі.
Екстремальні умови визначаються, передусім, зовнішніми умовами роботи(радіація, сильні електромагнітні поля, екстремальні значення температури, тиску і т. д.).
Окрім зовнішніх умов екстремальні ситуації характеризуються і певним переліком специфічних робіт, що підлягають виконанню. Ці роботи включають сотні різних технологічних операцій. Основним типом технічних систем, що вимагаються для виконання цих операцій, є РТС, завдяки характерній для них багатофункціональності і гнучкості, що дозволяють оперативно виконувати різні технологічні операції. Окрім них для виконання окремих типових технологічних операцій потрібно досить широку номенклатуру спеціальних технологічних систем, з якими РТС повинні взаємодіяти.
Прикладами таких спеціальних технічних систем можуть служити будівельні, будівельно-дорожні, транспортні, погрузо-разгрузочные машини - екскаватори, бульдозери, крани і т. д., але в спеціальному виконанні, призначеному для роботи в екстремальних зовнішніх умовах.
Найбільш важливими характеристиками РТС для даної сфери їх застосування являються способи управління, переміщення і енергоживлення. Сьогодні основним способом управління цими технічними системами є комбінація дистанційного автоматизованого керування з боку людини-оператора і місцевого автоматичного управління. Переміщення до місця роботи може забезпечуватися спеціальними транспортними засобами(крани, вертольоти і т. п.) або власною системою пересування(мобільні РТС). Енергоживлення може бути автономним, кабельним або комбінованим.

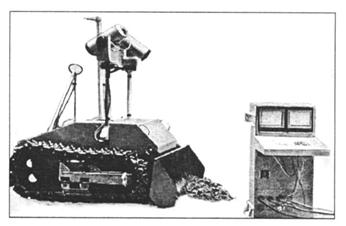
Рис. 3.18 Важкий робот ТР-Г2 : згори - рухливі телевізійні камери і інші сенсорні пристрої, справа - пульт управління
На Рис. 3.16-3.18 показані приклади роботів, використаних на роботах по ліквідації наслідків аварії на Чорнобильській АЕС. На місце роботи ці роботи доставлялися за допомогою вертольотів.