Концепція проектування мехатронних модулів і систем.
Проектування мехатронных систем і пристроїв базується на використанні інформаційних технологій, зокрема, технології автоматизації проектування.
Проблему підвищення конкурентоспроможності наукомістких виробів(яких належать мехатронные системи і пристрої) можна розв'язати за рахунок скорочення тимчасових і матеріальних витрат виробництва і підвищення ефективності процесів життєвого циклу(ЖЦ) виробів, а також використання сучасних комп'ютерних систем на усіх етапах ЖЦ виробів.
У зв'язку з ускладненням виробів різко збільшується об'єм даних про виріб, і старі методи роботи по його проектуванню, виробництву і експлуатації вже не в змозі забезпечити їх точність, цілісність і актуальність. При великій кількості учасників проекту і виробництва додатково виникають серйозні проблеми, що пов'язані з обміном даними між учасниками, виражаються в наявності комунікаційних бар'єрів.
Концептуальною основою проектування мехатронных систем є наступні положення:
- Основою розробки мехатронных систем служать методи поєднаного(паралельного) проектування, що припускають поєднання в часі виконання деяких етапів проектування, що виконуються послідовно при традиційному проектуванні(наприклад, послідовно виконується розробка механічною, електронною, сенсорною і комп'ютерною частин системи з подальшою розробкою інтерфейсних блоків).
- Синергетичний характер мехатронных систем зумовлює, що складові частини системи не просто доповнюють один одного, але об'єднуються таким чином, що утворена ними система починає мати нові властивості. При цьому мехатронные системи, на відміну від традиційних, мають меншу структурну надмірність і більшою мірою інтеграції. В результаті підвищується конструктивна компактність системи(аж до мініатюризації в мікромашинах), покращуються массогабаритные і динамічні характеристики машин, спрощуються кінематичні ланцюги. При цьому виникають додаткові можливості при проектуванні мехатронных систем, що якнайкраще відповідають вимогам замовника.
- Інтегровані мехатронные елементи вибираються розробником вже на стадії проектування машини, а потім забезпечується необхідна інженерна і технологічна підтримка при виробництві і експлуатації машини. У цьому радикальна відмінність мехатронных машин від традиційних, коли частенько користувач був вимушений самостійно об'єднувати в систему різнорідні механічні, електронні і інформаційно- облаштування різних виготівників, що управляють. Саме тому багато складних комплексів(наприклад, деякі гнучкі виробничі системи у вітчизняному машинобудуванні) показали на практиці низьку надійність і невисоку техніко-економічну ефективність.
- Проектування мехатронных систем базується на ідеях модульного конструювання, при якому з окремих багатофункціональних модулів(механічною, електронною, комп'ютерною частин системи) компонуються гнучкі складні системи модульної архітектури.
- У мехатронных системах спостерігається перерозподіл функціонального навантаження від апаратних(наприклад, електромеханічних) модулів до інформаційних(комп'ютерним) модулів. При цьому виключається багатоступінчасте перетворення енергії і інформації.
- При проектуванні мехатронных систем широко застосовуються методи візуалізації динамічних процесів, що протікають в системах, аж до використання систем віртуальної реальності при проектуванні складних технічних систем.
7. Високий рівень інтелектуалізації мехатронных систем диктує необхідність проектування інтелектуальних систем управління(для боротьби з неопределенностями, супутніми функціонуванню складних динамічних систем). При цьому потрібний обгрунтований вибір інтелектуальних технологій при проектуванні багаторівневих ієрархічних систем управління.
Практичне втілення цих принципів вимагає залучення усіх сучасних методів і засобів проектування складних систем(включаючи засоби концептуального проектування), частина з яких було описана вище в цьому розділі.
Необхідно відмітити, що проектування є одним з найвідповідальніших етапів життєвого циклу промислових виробів. На цьому етапі значною мірою закладається успіх виконання(реалізації) усіх інших етапів життєвого циклу, оскільки саме на цьому етапі проектування визначаються усі параметри системи, технологічність її виробництва(виготовлення), вимоги до організації виробництва, експлуатаційні якості і можливість утилізації.
В якості невдалого проекту можна навести приклад створення атомних підводних човнів(а можливо і усієї атомної енергетики), коли питанню утилізації атомних установок, що відпрацювали, не було приділено належної уваги. І зараз етап утилізації цих установок породив величезні проблеми і небезпеку для довкілля.
5.4.2. Алгоритм проектування
Згідно проектування мехатронных модулів засноване на спільному аналізі їх функціональною, структурною і конструктивною моделей. Метою проектування мехатронного модуля є перетворення початкових вимог в конструкторську реалізацію і відповідну документацію, по якій може бути виготовлена ця система, що задовольняє сформульованим показникам якості. Обмежимося розглядом тільки технічних показників, але при виборі структури і конструкції мехатронных модулів слід також враховувати економічні і експлуатаційні оцінки якості.
Загальний алгоритм проектування мехатронного модуля представлений на Рис. 3.2. Цей алгоритм передбачає три основні етапи проектування - це послідовно виконувані функціональний, структурний і конструктивний аналіз і синтез мехатронных модулів. Застосовуючи процедури функціонально-структурного і структурно-конструктивного аналізу, розробник оцінює рішення, що приймаються, прагнучи добитися високого рівня синергетичної інтеграції елементів. Для використання методів автоматизованого проектування формують взаємозв'язані функціональну (F- модель), структурну (5-модель) і конструктивну (С-модель) моделі мехатронного модуля.

Рис. 3.2. Загальний алгоритм проектування мехатронного модуля
Визначення функції ММ є проблемою концептуального проектування. Завдання проектування мехатронного модуля включає три основні етапи:
1) вибір варіантів структурних рішень модуля по його заданій функції і їх функціонально-структурний аналіз. Вхідною інформацією для цього етапу проектування є F- модель, а на виході формується 5-модель мехатронного модуля;
2) структурно-конструктивний аналіз конструкторських рішень і побудова С-модели мехатронного модуля;
3) конструкторська реалізація вибраного варіанту модуля з розробкою конструкторської документації.
Таким чином, завдання проектування мехатронного модуля полягає в знаходженні найкращої відповідності між заданою функцією і конструктивним виконанням.
Ключовою методологічною ідеєю цього підходу є пріоритет функції модуля над її структурною організацією і конструктивним рішенням. У мехатронном модулі задані функціональні перетворення можуть бути реалізовані декількома наборами структурних блоків, а ці блоки, у свою чергу, можуть мати різне конструкторське виконання. Таким чином, при проектуванні модуля його структура і конструктивне рішення є підлеглими по відношенню до заданої функції.
Функціонально-структурний підхід, заснований на еволюційному методі синтезу технічних систем, запропонований акад. Е. П. Балашовым і розроблений для завдань проектування комплексів, що інформаційно-управляють, і обчислювальних пристроїв. У функціонально-структурний підхід об'єднаний із структурно-конструктивним аналізом в загальну методику розробки мехатронных модулів. Специфіка і складність мехатронных модулів полягає в тому, що їх складники(механічна, електронна і комп'ютерна) мають різну фізичну природу, а основні структурні елементи випускаються частенько підприємствами різних галузей промисловості.
У детально описані усі етапи проектування і конструювання мехатронных модулів. Цей опис в основному торкається механічних частин мехатронных систем(мехатронных модулів руху). На додаток до розглянемо принципи проектування інтелектуальних систем управління на прикладах з робототехники.
Фундаментальну основу концепції побудови інтелектуальних систем управління складними динамічними об'єктами складають три ключові положення:
1. розвиток принципу ситуаційного управління, коли кожному класу можливих станів ставиться у відповідність певний клас допустимих рішень;
2. принцип ієрархічної організації інтелектуальної системи управління, що включає до свого складу стратегічний рівень планування поведінки, тактичний рівень планування дій, виконавчий(приводний) рівень і комплекс інформаційно-вимірювальних засобів;
3. принцип обгрунтованого вибору інтелектуальних технологій, використовуваних для вирішення завдань окремих рівнів ієрархії управління.
До цих трьох положень слід додати четверте, пов'язане з використанням концепції модульного конструювання систем управління.
На Рис. 3.3 показаний алгоритм функціонування інтелектуальної системи управління робототехнічним комплексом.
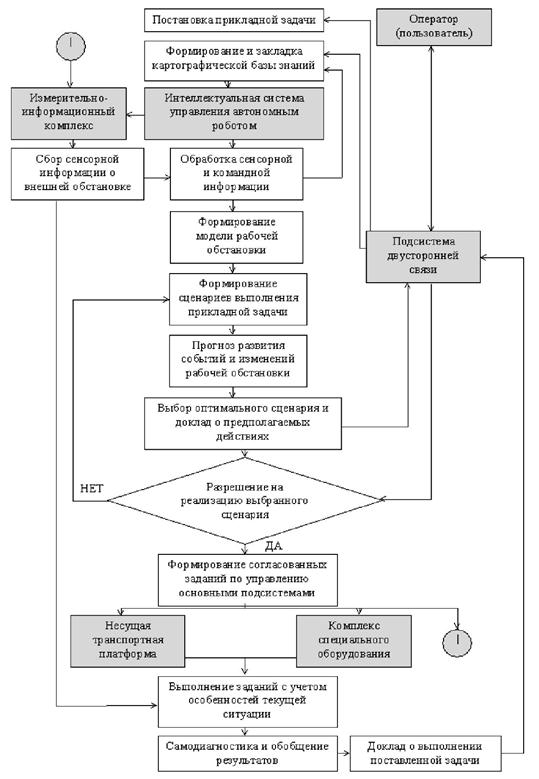
Рис. 3.3. Узагальнений алгоритм функціонування інтелектуальної системи управління автономним робототехнічним комплексом
Аналіз особливостей і порядку доцільного функціонування автономних роботів дозволяє сформулювати набір основних вимог до розробки інтелектуальної бортової системи управління, а також вимірювально-інформаційної підсистеми і засобів двостороннього зв'язку як її невід'ємних частин. Ці вимоги обумовлюють склад необхідних функціональних можливостей інтелектуальної системи управління, представлених на Рис. 5.10 і що включають людино-машинний інтерфейс, оцінку ситуацій і на основі аналізу сенсорної інформації, інтелектуальні і моторно-рухові функції.
Вибір і комплектація оптимального складу елементів для блоковий- модульної побудови складних технічних систем того або іншого призначення з необхідним набором функціональних можливостей припускає необхідність обліку не лише кількісних даних, але і якісних представлень, оцінок і понять, узагальнювальних практичний досвід проведення проектно-конструкторских робіт. Ефективним інструментом для вирішення завдань такого типу, що важко формалізуються, служать експертні системи, що мають здібності робити логічні висновки, давати рекомендації, обгрунтовувати правильність висновків на основі обробки закладених в них знань з конкретної предметної області по аналогії з діями кваліфікованого фахівця. Слід зазначити, що упродовж ряду останніх років розвиток технологій розробки експертних систем є одним з пріоритетних напрямів автоматизації програмування. Найбільш вагомі практичні результати, що наочно ілюструють рівень сучасних досягнень в цій області, охоплюють діапазон від універсальних експертних оболонок, таких, як наприклад, EXSYS, GURU та ін., до інтегрованих програмних середовищ типу ART, KEE або G2, які проблемно-ориентированны на створення прикладних інтелектуальних систем, у тому числі що функціонують і в реальному часі, підтримують різні форми представлення знань і механізми виведення логічних висновків, дозволяють забезпечити організацію багатофункціонального інтерфейсу з графічним відображенням інформації, поясненням приймається рішення і їх трасування.
Таким чином, проблема автоматизації блоково-модульного проектування механічних конструкцій, структури сенсорної і інструментальний- технологічного оснащення робота може бути зведена до розробки спеціалізованої експертної системи, узагальнена структура якої представлена на Рис. 3.4.

Рис. 3.4. Узагальнена структура експертної системи для автоматизації проектування механічних конструкцій, сенсорної і інструментальний- технологічного оснащення інтелектуальних роботів
Оскільки функціональна і технологічна гнучкість інтелектуальних роботів визначається як кінематичною схемою і конструкцією маніпулятора, так і значною мірою складом сенсорного і інструментального оснащення, то вибір сукупності цих елементів має бути реалізований у рамках єдиної експертної оболонки, що забезпечує звернення до відповідних баз даних і знань.
Розміщення датчиків системи очувствления є не менш важливим завданням, чим вибір її складу, оскільки установка сенсорних елементів некоректним або неоптимальним чином може привести до істотного обмеження адаптивних можливостей роботи в цілому.
Більшості засобів датчиків очувствления відповідає декілька допустимих варіантів установки, які визначаються їх призначенням, конструкцією і принципами дії, а також характером виконуваних роботом операцій. Пошук найкращого з них також може бути включений до складу функцій, що виконуються експертною системою на етапі вибору оптимального складу системи очувствления робота. Визначення точних параметрів установки засобів очувствления вимагає залучення спеціалізованих інструментальних процедур, що дозволяють врахувати характерні особливості розміщуваного пристрою, конструкції маніпулятора і специфіку зовнішнього середовища в режимі моделювання.
Опис загального призначення і передбачуваних умов функціонування робота разом з результатами проектування модульного компонування його механічної і вимірювально-інформаційної підсистем, а також складу технологічного оснащення служать в якості сукупності початкових даних для розробки комплекту програмного забезпечення інтелектуальної системи управління. Ефективність проведення цих робіт, що відносяться до одного з найскладніших і відповідальніших етапів проектування інтелектуальних роботів, може бути забезпечена виключно за допомогою засобів автоматизації, заснованих на застосуванні сучасних інформаційних технологій і методів обробки знань.
У цьому зв'язку потенційні переваги експертних систем відкривають широкі перспективи для автоматизації наскрізного циклу синтезу і відладки програмного забезпечення інтелектуальних роботів. При цьому використання єдиних принципів побудови інтелектуальної системи управління роботом і інструментальних засобів розробки її програмного забезпечення дозволяє організувати безпосередню оцінку правильності проектних рішень, що приймаються, з урахуванням адекватності їх реалізації початковим вимогам. Крім того, узагальнена структура експертної системи, призначеної для автоматизації наскрізного циклу синтезу і відладки програмного забезпечення інтелектуальних роботів, повинна передбачати можливість її інтеграції із засобами машинної графіки і геометричного моделювання (Рис. 3.5).
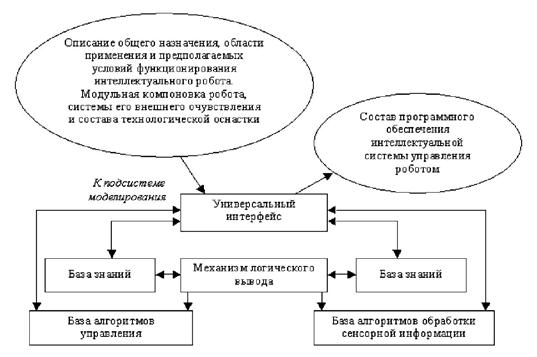
Рис. 3.5. Узагальнена структура експертної системи для автоматичного синтезу і відладки програмного забезпечення інтелектуальних роботів
Відмітною особливістю цієї експертної системи є наявність бази алгоритмів управління і обробки сенсорної інформації, що представляють потенційний інтерес для організації доцільної поведінки інтелектуальних роботів. Відповідні алгоритми управління і програмно-алгоритмічні процедури, що реалізовують їх, повинні мати певну інваріантність до різних типів кінематичних схем маніпуляційних роботів. Подібний набір універсальних програмних засобів, необхідних для управління рухом роботів в умовах складно організованих сцен з перешкодами, може включати наступні процедури:
• планування рухів маніпулятора і побудова оптимальних траєкторій переміщення його эффектора з використанням методів пошуку шляху на графі;
• планування рухів маніпулятора на основі мінімізації функціонала розузгодження його початкового і цільового станів чисельними методами або із застосуванням інтелектуальних технологій;
• інтерполяція рухів маніпулятора за допомогою сплайн-функций;
• планування конфігурацій і оптимальних переміщень маніпулятора в просторі його узагальнених координат на основі методу хвилі, що біжить.
Обробка і аналіз сенсорної інформації, її узагальнення і інтерпретація є найважливішими функціями інтелектуальної системи управління роботом і реалізуються за допомогою різних алгоритмів, вибір яких у кожному конкретному випадку визначається комплектацією засобів зовнішнього очувствления. По своєму складу база алгоритмів обробки сенсорної інформації повинна відбивати усе різноманіття інформаційно- вимірювальних засобів, що використовуються як елементи очувствления інтелектуальних роботів, включаючи системи технічного зору, лазерні і ультразвукові далекоміри, тактильні датчики і т. д.
Формування і подальша відладка модульного комплекту програмно-алгоритмічного забезпечення інтелектуальної системи управління регламентується вмістом бази знань, яка може видозмінюватися і поповнюватися в режимі редагування або самонавчання.
Потужним засобом моделювання і проектування мехатронных систем є пакет True Space. По своїх функціональних можливостях цей пакет відноситься до систем проектування так званої «віртуальної реальності» як деякої штучної моделі природного світу, адекватно тієї, що відбиває його специфіку, нюанси і основні фізичні закономірності. Набір стандартних функцій геометричного моделювання, що реалізовуються в пакеті, доповнений спеціалізованим інструментальним комплектом наступного складу :
• Magnetic Tools - організація рухів одних об'єктів без відриву від поверхні інших;
• Metaball Blobs - моделювання ефектів «живої шкіри» і «гладких переходів» окремих предметів один в одного з регулюванням сили дії на об'єкти, з можливістю їх деформації, втискування і т. д. в реальному часі;
• PlastiForm - реалізація функцій «скульптурного моделювання» і обробки пластичних форм;
• 3D Plug Ins - наявність зовнішнього комплекту вбудовуваних модулів з відкритим стандартом для сторонніх розробників і забезпечення сумісності з 32-бітовими фільтрами Adobe Photoshop; штатний склад вбудованого комплекту включає три модулі - Particle Fountain(фонтан часток), Primitives Plus(генератор ландшафту) і True View(планувальник сцени);
• Dynamics - емуляція реальних фізичних властивостей, явищ і закономірностей, що дозволяють імітувати вагу, пружність, гравітацію, силу вітру і т. д. з можливістю моделювання динамічної поведінки об'єктів в умовах зовнішнього середовища із заданими характеристиками;
• Inverse Kinematics - реалізація рухів синтезованої кінематичної структури при додатку зовнішніх дій;
• розвиток засобу звукового супроводу модельованих процесів.
Використання методів і технологій «віртуальної реальності» дозволяє не лише підвищити ефективність процесів автоматизованого синтезу і відладки програмно-алгоритмічного забезпечення інтелектуальних роботів, але і організувати їх попереднє навчання на основі моделювання потенційно допустимих ситуацій з урахуванням можливих неопределенностей. Метою такого навчання по прикладах є відшукування найкращих форм доцільної поведінки в умовах реальної обстановки і автоматичне формування правил, дій робота, що регламентують послідовність, в тих або інших випадках.
Інтеграція переваг сучасних технологій обробки знань, машинного моделювання і комп'ютерної графіки у складі єдиного комплексу інструментальних засобів автоматизації проектування інтелектуальних роботів відкриває широкі можливості для вирішення різних прикладних завдань, що далеко виходять за рамки його прямого значення. До цієї сфери повною мірою можуть бути віднесені завдання технологічної підготовки гнучких автоматизованих виробництв, їх проектування і моделювання, обгрунтований вибір необхідного робототехнічного устаткування і його автономне програмування.
У цьому навчальному посібнику в розділі 5 знайшли відображення тільки найзагальніші основи проектування мехатронных систем. У нім майже не розглянуті питання моделювання мехатронных систем, апаратні і програмні засоби інтелектуальних систем, відладка програмно- алгоритмічного забезпечення, розробка засобів навчання і т. д.
У роботі розглянуті інжинірингові засоби, використовувані при проектуванні, дослідженні і експлуатації складних автоматизованих електромеханічних систем і комплексів.
У роботі розглянутий підхід до створення системи інформаційної підтримки наскрізного проектування і виробництва робототехнічних комплексів, що реалізовуються в ГНЦ РФ ЦНИИ РТК. Розглянута схема проходження конструкторсько-технологічної документації при її розробці і узгодженні, описана інтегрована система планування і управління ресурсами підприємства «Базис-ресурс», MRPII, що відноситься до класу.