Криволинейное движение
При криволинейном движении у вектора скорости изменяется направление. При этом может меняться и его модуль, т. е. длина. В этом случае вектор ускорения  раскладывается на две составляющие: касательную к траектории
раскладывается на две составляющие: касательную к траектории  и перпендикулярную к траектории
и перпендикулярную к траектории  (рис. 10). Составляющая называется тангенциальным (касательным) ускорением, составляющая –нормальным(центростремительным) ускорением.
(рис. 10). Составляющая называется тангенциальным (касательным) ускорением, составляющая –нормальным(центростремительным) ускорением.

Рис. 10.
Ускорение при криволинейном движении
Тангенциальное ускорение характеризует быстроту изменения линейной скорости, а нормальное ускорение характеризует быстроту изменения направления движения.
Полное ускорение равно векторной сумме тангенциального и нормального ускорений:
 (15)
(15)
Модуль полного ускорения равен:
 .
.
Рассмотрим равномерное движение точки по окружности. При этом  и
и  . Пусть в рассматриваемый момент времени t точка находится в положении 1 (рис. 11). Спустя время Δt точка окажется в положении 2, пройдя путь Δs, равный дуге 1—2. При этом скорость точки v получает приращение Δv, в результате чего вектор скорости, оставаясь неизменным по величине, повернется на угол Δφ, совпадающий по величине с центральным углом, опирающимся на дугу длиной Δs:
. Пусть в рассматриваемый момент времени t точка находится в положении 1 (рис. 11). Спустя время Δt точка окажется в положении 2, пройдя путь Δs, равный дуге 1—2. При этом скорость точки v получает приращение Δv, в результате чего вектор скорости, оставаясь неизменным по величине, повернется на угол Δφ, совпадающий по величине с центральным углом, опирающимся на дугу длиной Δs:
 (16)
(16)
где R—радиус окружности, по которой движется точка. Найдем приращение вектора скорости  Для этого перенесем вектор
Для этого перенесем вектор  так, чтобы его начало совпадало с началом вектора
так, чтобы его начало совпадало с началом вектора  . Тогда вектор
. Тогда вектор  изобразится отрезком, проведенным из конца вектора
изобразится отрезком, проведенным из конца вектора  в конец вектора . Этот отрезок служит основанием равнобедренного треугольника со сторонами и и углом Δφ при вершине. Если угол Δφ невелик (что выполняется для малых Δt), для сторон этого треугольника можно приближенно написать:
в конец вектора . Этот отрезок служит основанием равнобедренного треугольника со сторонами и и углом Δφ при вершине. Если угол Δφ невелик (что выполняется для малых Δt), для сторон этого треугольника можно приближенно написать:
 .
.
Подставляя сюда Δφ из (16), получаем выражение для модуля вектора  :
:
 .
.
Разделив обе части уравнения на Δt и сделав предельный переход, получим величину центростремительного ускорения:
 . (17)
. (17)
Здесь величины v и R постоянные, поэтому их можно вынести за знак предела. Предел отношения  – это модуль скорости
– это модуль скорости  Его также называют линейной скоростью.
Его также называют линейной скоростью.
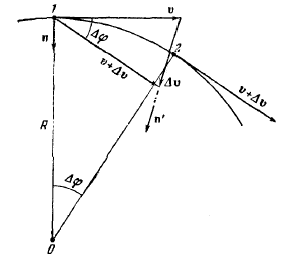
Рис. 11.
Радиус кривизны
Радиус окружности R называется радиусом кривизны траектории. Величина, обратная R, называется кривизной траектории:
 .
.
где R — радиус рассматриваемой окружности. Если α есть центральный угол, соответствующий дуге окружности s, то, как известно, между R, α и s имеет место соотношение:
s = Rα. (18)
Понятие радиуса кривизны применимо не только к окружности, но и любой кривой линии. Радиус кривизны (или обратная ему величина – кривизна) характеризует степень изогнутости линии. Чем меньше радиус кривизны (соответственно, чем больше кривизна), тем сильнее изогнута линия. Рассмотрим это понятие подробнее.
Кругом кривизны плоской линии в некоторой точке A называется предельное положение окружности, проходящей через точку А и две другие точки В1 и В2 при их бесконечном приближении к точке А (на рис. 12 кривая проведена сплошной линией, а круг кривизны — пунктирной). Радиус круга кривизны дает радиус кривизны рассматриваемой кривой в точке A, а центр этого круга — центр кривизны кривой для той же точки А.
Проведем в точках B1 и В2 касательные B1D и В2Е к окружности, проходящей через точки В1, А и B2. Нормали к этим касательным B1С и В2С представят собой радиусы R окружности и пересекутся в ее центре С. Введем угол Δα между нормалями В1С и В2С; очевидно, он равен углу между касательными В1D и В2E. Обозначим участок кривой между точками B1 и В2 как Δs. Тогда по формуле (18):
 .
.
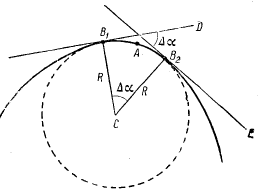
Рис. 12.
Круг кривизны плоской кривой линии

Рис. 13.
Определение кривизны плоской кривой в разных точках
На рис. 13 изображены круги кривизны плоской линии в разных точках. В точке A1, где кривая является более пологой, радиус кривизны больше, чем в точке A2, соответственно, кривизна линии в точке A1 будет меньше, чем в точке A2. В точке A3 кривая является еще более пологой, чем в точках A1 и A2, поэтому радиус кривизны в этой точке будет больше, а кривизна меньше. Кроме того, круг кривизны в точке A3 лежит по другую сторону кривой. Поэтому величине кривизны в этой точке приписывают знак, противоположный знаку кривизны в точках A1 и A2: если кривизну в точках A1 и A2 будем считать положительной, то кривизна в точке A3 будет отрицательной.