Структурные формулы пространственных и плоских механизмов (Степень подвижности механизмов).
Лекция 2
Степень подвижности пространственного механизма в общем случае определяется выражением

 - количество подвижных звеньев,
- количество подвижных звеньев,
n – общее количество звеньев,
 - количество КП 5-го класса,
- количество КП 5-го класса,
 - 4-го класса,
- 4-го класса,
 - 3-го класса,
- 3-го класса,
 - 2-го класса,
- 2-го класса,
 - 1-го класса.
- 1-го класса.
В несколько ином виде это равенство было получено в 1887 году П.И. Сомовым, уточнено в 1923 году А.П. Малышевым и носит название формулы Сомова-Малышева.
Аналогично определяется степень подвижности плоских механизмов, в состав кинематический цепей которых входят кинематические пары только 4-го и 5-го классов. Так как каждое из звеньев плоского механизма, будучи совершенно свободным обладает на плоскости тремя степенями свободы, а общее число связей, налагаемых кинематическими парами 5-го и 4-го классов, составляет  , то степень подвижности плоского механизма определяется как
, то степень подвижности плоского механизма определяется как

Формула впервые получена П.Л.Чебышевым в 1870 году и носит его имя.
Эти формулы часто называют структурными формулами пространственного и плоского механизма, соответственно.
Эти зависимости имеют большое практическое значение, так как позволяют для механизма любой сложности определить количество независимых обобщенных координат (в механике независимые между собой параметры, которые однозначно определяют положение механич. системы в пространстве, а их число равно числу степеней свободы системы), однозначно определяющих положения, скорости и ускорения всех звеньев механизма. Число обобщённых координат равно степени подвижности механизма. Звенья, с которыми связывают независимые обобщённые координаты, или задают этим звеньям определённый закон движения, называют начальными, а их количество должно строго соответствовать степени подвижности механизма. На структурных и кинематических схемах механизмов начальные звенья, в отличие от других подвижных звеньев, снабжают односторонними стрелками, указывающими направление их движения.
В качестве начального может рассматриваться, в принципе, любое из подвижных звеньев механизма (входное, промежуточное, выходное). Однако, с целью упрощения процедуры последующих исследований кинематики и динамики механизма рекомендуется за начальные принимать те звенья, которые посредством кинематических пар подсоединяются непосредственно к неподвижному звену механизма (к стойке) и совершают одно из простейших плоских движений: вращательное или поступательное.
Структурные компоненты механизмов
Для совершенствования и обобщения методов кинематического и динамического исследования механизмов используют их структурную классификацию, основанную на детальном изучении строения механизмов. Структурная классификация предусматривает представление кинематической цепи механизма, как совокупности некоторых элементарных структурных компонент, для каждой из которых существуют индивидуальные подходы к исследованию и кинематики, и динамики.
Основы структурной классификации плоских одноподвижных механизмов, кинематические цепи которых содержат только низшие КП 5-го класса, разработаны профессором Петербургского политехнического института Леонидом Владимировичем Ассуром в 1914 году. В дальнейшем его положения были распространены и на механизмы, степень подвижности которых больше единицы.
Принцип Ассура состоит в следующем: любой механизм может быть представлен, как результат последовательного наслоения отдельных структурных компонент на, так называемый, основной механизм.
Все структурные компоненты представляют собой простейшие статически определимые кинематические цепи. Структурные компоненты характеризуются классом, видом и порядком так же, как это принято в классификации кинематических цепей (см. лекцию 1), и для каждой из них может быть составлена структурная формула строения.
Структурными компонентами, которыми оперирует принцип Ассура, являются: основной механизм, отдельное начальное звено и структурная группа звеньев, называемая группой Ассура. Рассмотрим эти компоненты.
Основной механизм (ОМ) – это открытая кинематическая цепь I-го класса нулевого порядка, обладающая единичной степенью подвижности (W=1) и состоящая из стойки механизма, начального звена (точнее, одного из начальных звеньев механизма, если таких в нём несколько) и внутренней кинематической пары 5-го класса, соединяющей начальное звено со стойкой.
В зависимости от типа кинематической пары 5-го класса основного механизма различают два его вида, изображённые на рис.1.9 а,б, где приведены и их структурные формулы строения.

Рис.1.9
Если степень подвижности механизма больше единицы и в его составе несколько начальных звеньев, то одно из них включается в состав основного механизма, а остальные являются элементами таких структурных компонент, как отдельные начальные звенья (ОНЗ), количество которых в механизме на единицу меньше его степени подвижности.
Отдельное начальное звено (ОНЗ) – это открытая кинематическая цепь I-го класса 1-го порядка, состоящая из начального звена и одной кинематической пары 5-го класса, при помощи которой ОНЗ присоединяется к стойке механизма. ОНЗ присутствует только в тех механизмах, степень подвижности которых больше единицы. Среди всех структурных компонент, участвующих в образовании таких механизмов, отдельные начальные звенья следует относить к первоочередным компонентам, наслаеваемым на основной механизм.
Как и основной механизм, ОНЗ обладает единичной степенью подвижности (  ) и в зависимости от типа кинематической пары может быть 1-го и 2-го вида, как показано на рис.1.10. и отображено в структурных формулах строения ОНЗ.
) и в зависимости от типа кинематической пары может быть 1-го и 2-го вида, как показано на рис.1.10. и отображено в структурных формулах строения ОНЗ.
Рис.1.10
В любом механизме все ведомые звенья образуют одну или несколько структурных компонент, называемых нормальными структурными группами звеньев или группами Ассура (ГА).
Группой Ассура (ГА) называется такая замкнутая кинематическая цепь, состоящая из ведомых звеньев механизма и кинематических пар 5-го класса, которая после мысленного присоединения её внешними кинематическими парами к стойке обладает нулевой степенью подвижности, причём её кинематическая цепь не распадается на более простые КЦ, удовлетворяющие условию  .
.
Располагая формулой Чебышева, можно получить условие существования плоской кинематической цепи, которую можно рассматривать, как структурную группу Ассура. Если группа Ассура содержит  звеньев и
звеньев и  кинематических пар 5-го класса, а её степень подвижности равна нулю, то из формулы (1.2) следует, что
кинематических пар 5-го класса, а её степень подвижности равна нулю, то из формулы (1.2) следует, что

Отсюда вытекает соотношение между количеством звеньев и числом КП 5-го класса в группах Ассура:
 . (1.3)
. (1.3)
Из этого равенства видно, что в структурной группе Ассура число кинематических пар 5-го класса должно быть кратно трём и чётное количество звеньев. Условию (1.3) удовлетворяет бесконечное множество сочетаний между и , но в реальных механизмах в большинстве случаев встречаются структурные группы, содержащие не более шести звеньев.
Простейшей замкнутой кинематической цепью, удовлетворяющей условию (1.3), являются КЦ II-го класса 2-го порядка (рис.1.11), состоящие из двух звеньев и трёх кинематических пар 5-го класса. Такие КЦ называют двухповодковыми группами Ассура II-го класса, среди которых в зависимости от типа внутренней или внешних КП различают группы пяти видов.

Рис.1.11
Группа Ассура II-го класса первого вида имеет в своём составе только вращательные КП (рис.1.11 а). В двухповодковой группе второго вида одна из внешних КП является поступательной, а остальные вращательные (рис.1.11 б). В группе третьего вида внутренняя КП поступательная, а внешние КП - вращательные (рис.1.11 в). К четвёртому виду относят двухповодковую группу Ассура, в которой обе внешние КП являются поступательными (рис.1.11 г). В группе пятого вида внутренняя и одна из внешних КП поступательные (рис.1.11 д). Двухзвенная КЦ с тремя поступательными КП 5-го класса (рис. 1.11 е) после её присоединения внешними КП к стойке не обладает нулевой степенью подвижности, поэтому не является структурной группой.
На рис 1.11 слева изображены схемы и приведены структурные формулы двухповодковых групп Ассура от первого до пятого видов, когда оси вращательных КП, в образовании которых принимают участие ползуны, находятся на некотором удалении  ≠0 от осей поступательных КП. При =0 (правые схемы на рис. 1.11) оси оговоренных выше вращательных КП располагаются на осях поступательных КП. Конфигурация КЦ таких двухповодковых групп Ассура несколько упрощается, но их виды и структурные формулы остаются прежними.
≠0 от осей поступательных КП. При =0 (правые схемы на рис. 1.11) оси оговоренных выше вращательных КП располагаются на осях поступательных КП. Конфигурация КЦ таких двухповодковых групп Ассура несколько упрощается, но их виды и структурные формулы остаются прежними.
Группы Ассура более высокого класса представляют собой сложные замкнутые КЦ, для которых выполняется соотношение (1.3). На рис.1.12 изображены схемы и приведенны структурные формулы строения групп Ассура III-го и IV-го класса, кинематические цепи которых содержат шесть КП 5-го класса и четыре звена (  ;
;  ).
).
С увеличением количества звеньев и кинематических пар, входящих в состав структурных групп Ассура, увеличивается и их разнообразие. На рис.1.13 приведены схемы и структурные формулы строения групп Асура от III-го до VI-го классов, замкнутые кинематические цепи которых образованны шестью звеньями и содержат по девять КП 5-го класса.
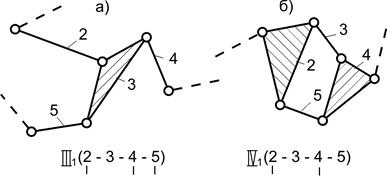
Рис.1.12
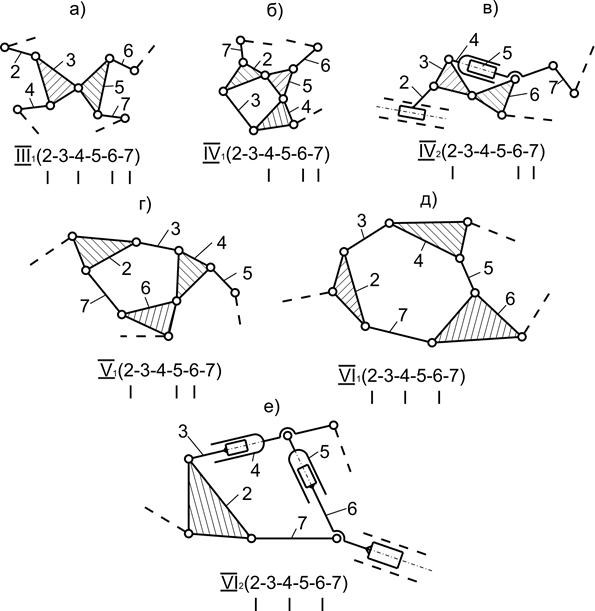
Рис.1.13
Можно представить и более сложные группы Ассура, в которых  . Отметим лишь, что в реальных механизмах широко используемых в технике, структурные группы Асура выше III-го класса используются редко.
. Отметим лишь, что в реальных механизмах широко используемых в технике, структурные группы Асура выше III-го класса используются редко.
Последовательность структурного анализа мы с вами рассмотрим на практике.
Структурный синтез механизмов по Ассуру заключается в последовательном наслоении структурных групп на первичные механизмы (основные звенья). Это можно изобразить в виде следующей схемы.
|
| Рис. 1.14 |
КИНЕМАТИЧЕСКИЙ АНАЛИЗ МЕХАНИЗМОВ