Основные понятия и классификация автоматических систем управления.
К основным в теории автоматического управления относят прежде всего общее понятие управления, понятия составных частей автоматической системы управления, алгоритма, различных воздействий и др.
Под управлениемпонимается процесс осуществления совокупности воздействий, направленных на поддержание или улучшение функционирования управляемого параметра в соответствии с заданным алгоритмом функционирования.
Алгоритм — это предписание, которое определяет содержание и последовательность операций, переводящих исходные данные в искомый результат.
Алгоритм функционирования представляет собой совокупность предписаний, необходимых для правильного выполнения технологического процесса в каком-либо устройстве или совокупности устройств.
Управляемым объектом называют устройство, которое непосредственно осуществляет технологический процесс, нуждающийся в оказании специально организованных воздействий извне для выполнения его алгоритма.
Автоматическое управляющее устройство осуществляет воздействие на управляемый объект в соответствии с алгоритмом управления.
Точка автоматической системы или устройства, к которой приложено рассматриваемое воздействие, называется входом, а та точка, в которой наблюдается эффект, вызванный рассматриваемым воздействием, — выходом. Соответственно и воздействия разделяют на входныеи выходные.
Автоматическая система испытывает влияние внешних и внутренних планируемых задающих и непланируемых возмущающих воздействий .
Под внешним понимается воздействие извне, то есть внешней среды, а под внутренним— воздействие одной части автоматической системы на другую.
Автоматическое управление объектом в соответствии с его алгоритмом управления осуществляется посредством задающего воздействия. Величину, характеризующую планируемое выходное воздействие управляемого объекта, называют управляемой величиной. По своей природе она может быть различной: механической, электрической, тепловой, световой, акустической и т. д. Значение управляемой величины, предусмотренное алгоритмом функционирования, принято называть предписанным, а измеренное (фактическое) — действительным.
Возмущающим считают воздействие, которое не предусмотрено алгоритмом управления. Обычно возмущающее воздействие вызывает ухудшение или нарушение работы системы автоматического управления.
Различают воздействие управляющего устройства на управляемый объект и, наоборот, воздействие управляемого объекта на управляющее устройство. В первом случае воздействие называется управляющим, а во втором — контрольным.
Классификация автоматических систем управления по нескольким основным признакам может быть проиллюстрирована рисунком 1.
В зависимости от алгоритма функционирования автоматические системы принято разделять на стабилизирующие, программные, следящие и самоприспосабливающиеся.
В стабилизирующей системе алгоритм функционирования содержит предписание поддерживать управляемую величину постоянной.
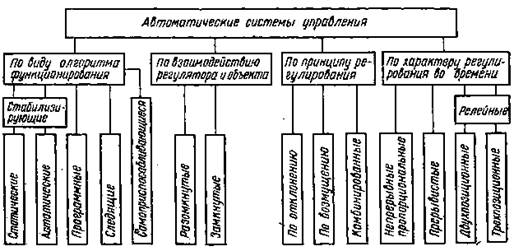
Рис. 1. Классификация автоматических систем управления.
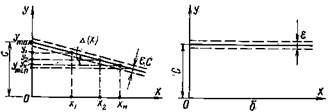
Рис. 2. Характеристика статического (а) и астатического (б) регулирования.
Стабилизирующая система в статическом режимехарактеризуется (рис. 2, а) определенными зависимостями выходной величины от входной, которые описываются уравнением
у = С + Δ(х), (1)
где С — постоянная, равная предписанному значению;
у — управляемая величина;
Δ(х) — статическая ошибка, то ость отклонение управляемой величины, зависящее от входного воздействия х.
Для оценки отклонения служат коэффициент (степень) неравномерности
и коэффициент статизма
 ,
,
где хн и ун — номинальные значения входной и выходной величин;
у1 и у2 — значения выходных величин, соответствующие входным величинам x1 и х2.
Если коэффициенты δ = 0 и kст = 0 во всей зоне управления, то управление называют астатическим(рис. 2, б), а автоматическую систему — астатической. Когда же δ ≠ 0 и k ≠0, и управление и автоматическую систему называют статическими.
Характеристики статического и астатического управления (рис. 2, а и б) графически обычно представляют одной линией. В действительности же имеется определенная зона изменения регулируемой величины, ширина которой иллюстрирует нечувствительность автоматической системы ε, вызываемую главным образом нечувствительностью датчиков к малым отклонениям у.
С учетом нечувствительности системы характеристику управления выражают уравнением
у = С + Δ(х)±εС.
При астатическом управлении Δ(х) = 0, то есть управляемая величина независимо от режима работы объекта управления сохраняет постоянное значение.
Для пояснения принципа действия статических и астатических АСУ в качестве примера рассмотрим систему управления уровнем жидкости в баке (рис. 3).
На рисунке 3, а показана схема ручного управления. Уровень Н измеряется стрелочным прибором, который кинематически связан с поплавком 1. В зависимости от показаний прибора персонал принимает решение и заслонкой 2 изменяет приток Q1 жидкости. Это пример разомкнутой системы, в которой изменение выходной величины (уровня Н) не вызывает изменений входной (притока Q1). В таких системах целенаправленные изменения входных величин осуществляются внешними воздействиями (в нашем примере — воздействием человека).
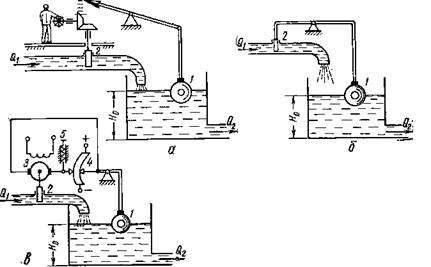
Рис. 3. Регулирование уровня жидкости: а — вручную; б — регулятором прямого действия со статической характеристикой; в — электрическим регулятором косвенного действия с статической характеристикой.
На рисунке 3, б показана замкнутая система автоматического управления уровнем. Изменение уровня Н вызывает перемещение заслонки 2, регулирующей приток Q1 жидкости. Таким образом, регулирующее воздействие со стороны регулятора на объект будет пропорционально отклонению ΔН регулируемой величины от заданного значения Но:
ΔQ = kpΔH, (4)
где ΔH = H0 — H — отклонение уровня Н воды от заданного Hо;
kp — коэффициент пропорциональности.
Рассматриваемая АСУ имеет статическую характеристику
H = Hо - H(Q). (5)
Примером астатической АСУ может служить система стабилизации уровня жидкости, схема которой показана на рисунке 3, в. При изменении расхода Q2 и, следовательно, уровня Но подвижный контакт, связанный с поплавком /, перемещается по потенциометру 4 и создает разность потенциалов на зажимах исполнительного двигателя 3. Двигатель 3 перемещает заслонку 2 так, чтобы уравнять приток жидкости Q1 с расходом Q2. Процесс автоматического управления заканчивается тогда, когда уровень жидкости достигнет первоначально заданного значения Но. Для изменения заданных значений уровня Но служит задатчик 5. При астатическом управлении воздействие на объект со стороны регулятора пропорционально интегралу от отклонения управляемой величины, то есть
ΔQ = k∫ΔHdt, (6)
где k— коэффициент пропорциональности.
Таким образом, у астатических регуляторов воздействие со стороны регулятора на объект происходит до тех пор, пока не устранится отклонение регулируемого параметра от заданного значения (в нашем случае отклонение уровня ΔН).
Стремление получить хорошие статические и динамические свойства, присущие соответственно астатическим и статическим системам регулирования, привело к созданию так называемых изодромных систем управления.
В изодромной системе имеется гибкая обратная связь, благодаря которой регулирующее воздействие пропорционально отклонению регулируемой величины и его интегралу:
ΔQ = kpΔH + k∫ΔΗdt. (7)
В такой системе в начале процесса регулирования главное управляющее воздействие, как и в статических Системах, осуществляется по отклонению регулируемой величины, а в переходном процессе, особенно к его концу, возрастает воздействие от интеграла по отклонению, сводящее самоотклонение к нулю. Следовательно, изодромная система в начале переходного процесса соответствует по свойствам статической, а в конце — астатической. Изодромная система управления подробно рассматривается в следующем параграфе на примере изодромного регулятора температуры теплоносителя шахтной зерносушилки.
Программной автоматической системой называют систему, алгоритм функционирования которой содержит предписание изменять управляемую величину в соответствии с заранее заданной функцией. Примером программной системы может служить автоматическая система управления дополнительным искусственным освещением и облучением в теплицах и птичниках. Схема управления строго по программе включает или отключает группы осветительных ламп в определенные часы суток.
Следящей автоматической системой называют систему, алгоритм функционирования которой содержит предписание изменять управляемую величину в зависимости от изменения заранее неизвестной переменной величины на входе.
Необходимо отметить, что в программных и особенно в следящих системах управляющее воздействие непрерывно изменяется, поэтому понятия астатической и статической характеристик управления здесь теряют смысл.
Самоприспосабливающаяся (адаптивная) система действует не только в соответствии с заданным алгоритмом функционирования, но и может в зависимости от конкретных условий самостоятельно изменять свою работу с целью достижения наивыгоднейшего режима. Режим работы такой системы характеризуется некоторым показателем качества, содержание которого зависит от конкретных условий и является функцией одной или нескольких величин. Для нее предписанный закон управления изменяется в соответствии с оценкой результата управления так, чтобы один или несколько показателей автоматизируемого процесса оставались в области заданных значений независимо от непрерывного изменения непланируемых воздействий.
Разновидностями самоприспосабливающихся считают экстремальные, обучаемые и другие системы управления. Экстремальная системаавтоматически поддерживает минимальное или максимальное значение регулируемой величины. В обучаемой системеалгоритм функционирования изменяется в соответствии с оценкой результата управления. Такая система непрерывно во времени анализирует опыт своей работы4, запоминает наилучшие варианты и постоянно совершенствует свои свойства. Пока опытных данных недостаточно, обучаемая система работает с большими ошибками, но по мере накопления опыта ее деятельность постепенно улучшается.
По характеру взаимодействия регулятора и объекта управления различают автоматические системы с разомкнутой и замкнутой цепью воздействия.
В автоматической системе с разомкнутой цепью воздействия входными воздействиями управляющего устройства служат только внешние воздействия. Другими словами, это такая автоматическая система, работа которой не зависит от характера реакции на это действие. Разомкнутые системы не могут самостоятельно поддерживать с высокой точностью предписанное значение управляемой величины.
В практике наибольшее распространение находят автоматические системы с замкнутой цепью воздействия, в которых входными воздействиями для управляющего устройства являются как внешние, так и контрольные воздействия, получаемые с объекта управления и по значению пропорциональные управляемому параметру.
В зависимости от того, по какому сигналу регулятор получает информацию о протекающих в объекте управления процессах и каким образом осуществляет соответствующие воздействия на управляемую величину, различают несколько основных принципов управления регулирования.
1 Исторически первым был предложен принцип управления (регулирования) по отклонению (принцип Ползунова). Регулятор, действующий по этому принципу, измеряет отклонение управляемой величины от заданного значения и через исполнительный блок воздействует на объект управления. Регулятор такого типа (уже рассмотренный нами) представлен на рисунке 3.
2 Принцип управления по возмущению (принцип Понселе) означает, что управление производится по значению возникшего возмущающего воздействия. Обычно подобный регулятор реагирует только на ограниченное число возмущающих воздействий и при большом количестве непланируемых воздействий оказывается неприменимым. Преимущество принципа управления по возмущению заключается в том, что вредное влияние возмущающего воздействия может быть устранено до того, как произойдет отклонение управляемой величины! Данный принцип приводит к построению в основном разомкнутых систем* управления и поэтому находит очень узкую область использования.
Цепь воздействия по возмущению обычно используется как дополнительная связь в системах управления по отклонению. В этом случае система, построенная по принципу отклонения, сохраняет все черты, присущие системе управления по возмущению. Такая система, совмещающая в себе принципы управления по отклонению и по возмущению, называется комбинированной. Дополнительная связь по возмущению обычно предназначается для ускорения процесса управления и для уменьшения пределов отклонения управляемой величины.
В зависимости от характера управления во времени автоматические системы управления могут быть непрерывного, прерывистого и релейного действия.
1 Система непрерывного (пропорционального) управления характеризуется тем, что в процессе управления сигнал у на ее выходе является непрерывной функцией времени и пропорционален воздействующей величине х на входе (рис. 4, а и б).
В системе прерывистого управления в процессе регулирования выходное управляющее воздействие у представляет собой последовательность импульсов, параметры которых (амплитуда, длительность или частота) определенным образом связаны с входной величиной х (рис. 4, а и в).
Система релейного управления характеризуется тем, что в процессе управления сигналы у на ее выходе принимают несколько определенных значений в зависимости от входной величины х (рис. 4, а, г и д). Сюда же относятся системы позиционного и вибрационного управления.
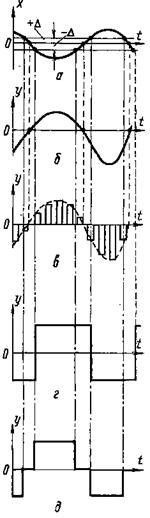 Рис. 4. Диаграмма изменения входной величины х (а) и выходной величины у систем непрерывного (б), прерывистого (в), двухпозиционного (г) и трехпозиционного (д) регулирования.
Рис. 4. Диаграмма изменения входной величины х (а) и выходной величины у систем непрерывного (б), прерывистого (в), двухпозиционного (г) и трехпозиционного (д) регулирования.
При двухпозиционномуправлении регулятор занимает только два устойчивых состояния: одно, когда отклонение управляемой величины превысит положительный предел +Δ, и второе, когда изменится знак отклонения и оно достигнет отрицательного предела -Δ. Управляющие воздействия у в обоих состояниях одинаковы по значению, но различны по знаку (рис. 4, г).
В случае трехпозиционного управлениярегулятор занимает одно из трех устойчивых положений (рис. 4, в). В диапазоне отклонений управляемой величины от +Δ до -Δ регулятор находится в так называемом нейтральном положении.
В зависимости от того, нуждается ли регулятор во вспомогательной энергии или обходится без нее, различают регуляторы прямого и непрямого действия. Вместе с этим и само понятие «управление» делят на прямое и непрямое.
Если для питания исполнительного и регулирующего органов достаточно энергии, получаемой от датчика или непосредственно от управляемой среды, то усилительный орган не требуется. В этом случае речь идет о регуляторе прямого действия (рис. 3, б). Благодаря простой конструкции, малой стоимости и высокой надежности эти регуляторы широко используются в ряде установок.
Регулятор, у которого отдельные органы получают питание от дополнительных источников энергии, называют регулятором непрямого (косвенного) действия (рис. 3, в). Такие регуляторы, разделяемые по виду энергии на электрические, механические, гидравлические, пневматические, комбинированные, характеризуются высокой точностью работы, более гибки в настройке и в управлении различными режимами.
Существуют и другие признаки классификации автоматических систем: по функциональному назначению, по виду используемой для управления энергии, по взаимосвязи управляемых параметров и т. д.